

接触网作业车智能辅助驾驶系统实现在监控、调车等场景下替代驾驶员对作业车进行智能控制,实现作业车自动驾驶,或辅助司机进行驾驶工作;保证作业车平稳安全运行且符合限速要求;实现在库内短距离遥控控制车辆前进后退至指定位置停车;实现驾驶员在非驾驶位短距离移动车辆。具有紧急切换功能,实现紧急状态下司机接管车辆控制。
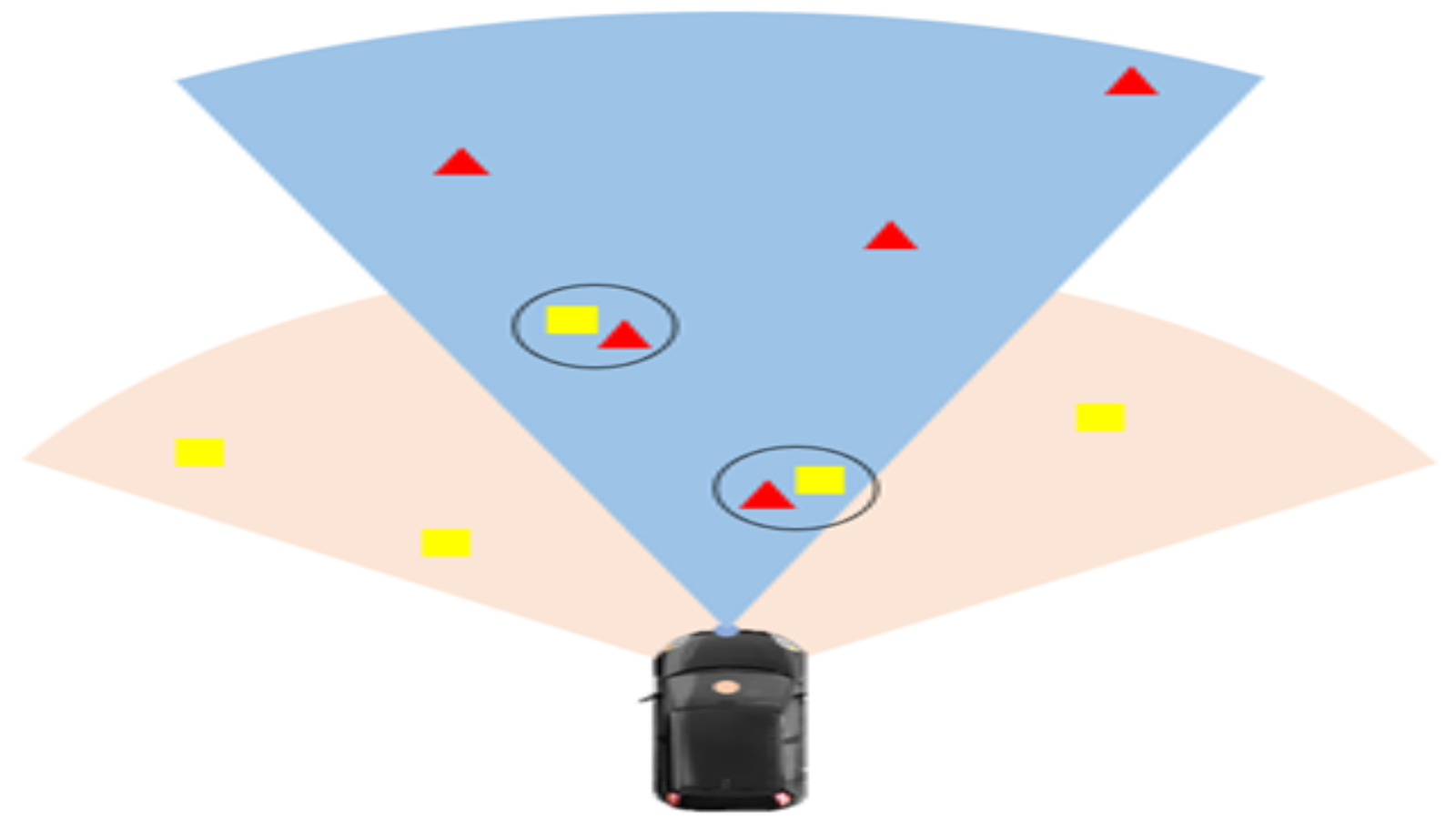
随着大数据、云计算和 5G 技术的成熟, 智能驾驶快速发展。车辆识别是智能驾驶的重要技术之一,针对传统单一传感器方法识别效果差、易受干扰等缺点,利用毫米波雷达与摄像头实现对路面障碍物的检测与定位。

无人驾驶拖拉机是在现有传统拖拉机上做出改进、拓展和创新,对无人驾驶技术、智能作业与传统拖拉机进行一体化融合,实现智能作业无人驾驶拖拉机自动路径规划导航、智能作业、全工况内无人驾驶,增加亩产、降低投入,全面提升农机行业自动化、信息化、智能化程度。

智能纯电动汽车融合智能汽车的安全性与舒适性以及电动汽车节能环保的优势,对环境感知层的机器视觉、激光雷达、毫米波雷达和V2X等数据信息进行融合后,根据车辆自身状态及车辆周边环境决策判断车辆驾驶模式,综合实现车辆自动驾驶需求。

(1)为弥补电子机械式制动系统的缺陷,发明的磁流变传动线控制动器具有结构简单、响应迅速(<10ms)等优点,实现了电子机械式制动器在全工况范围内制动力连续、快速输出。 (2)发明的线控制动系统分层控制逻辑,可实现效能更高的线控制动系统,有利于实现性能优越的主动安全控制器。 (3)开发的汽车制动模拟与制动器性能测试系统能够模拟任意路面附着条件,完成传统制动系统或线控制动系统的实验室测试与标定。

一种电驱动可变形无人车(后续可开发载人版),可实现轮式高速行驶及腿足跨步行走,具有广谱的道路适应性。

