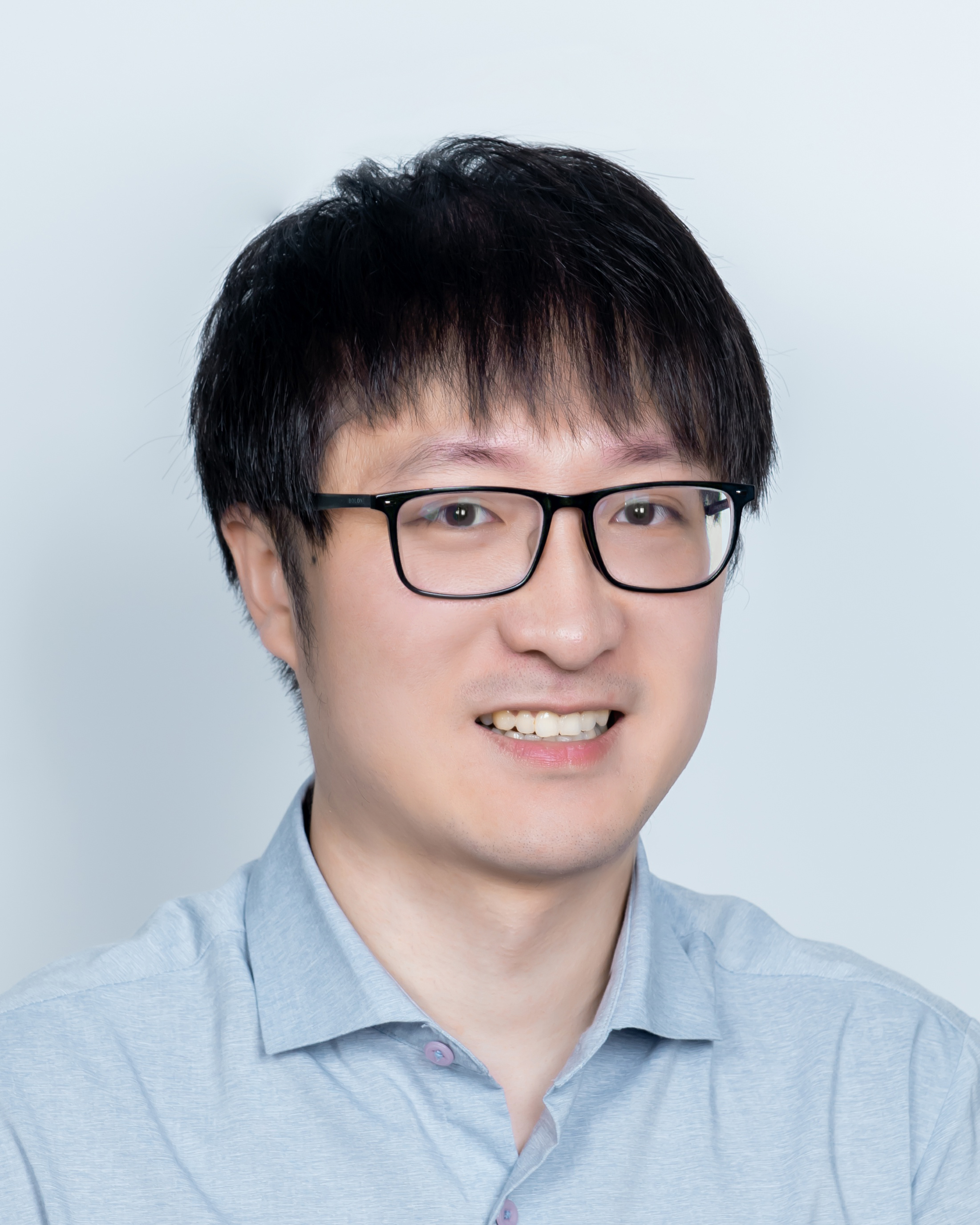
公开了一种一体化减少簧下质量的不等长双横臂悬架轮边驱动系统,包括不等长双横臂悬架、驱动一体化装置、万向节传动轴等。其中驱动一体化装置固定于车架,其包括驱动电机和行星轮减速器,一体化驱动装置与车轮传动轴通过万向节传动轴实现不等高但同轴线的动力传输,可以接受一定程度上在不平路面跳动时引起的一体化驱动装置和车轮轴的错位情况。汽车转向时,可以通过控制电机转速和转向杆来实现驱动系统和转向系统的独立工作。本设计不仅大幅度的减少了簧下质量,提高了车辆的平顺性和稳定性,而且可以利用传统转向方法实现一定角度的转向。
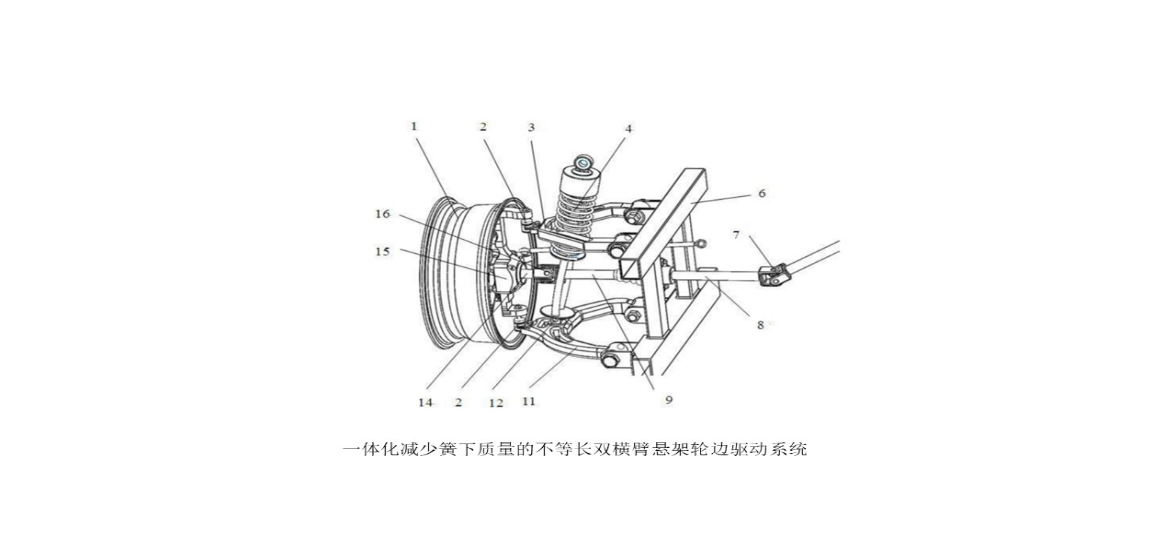
提供了一种工业双目摄像头与红外热成像仪联合标定的装置和方法,以张正友标定板内角点为圆心,开设小孔;在小孔内安装白炽灯泡;在张正友标定板上方安装工业双目摄像头和红外线热成像仪,两者对标定的装置拍摄时视角重合;本发明不仅设计简单、操作简单、成本低廉,能够同时标定两摄像头。
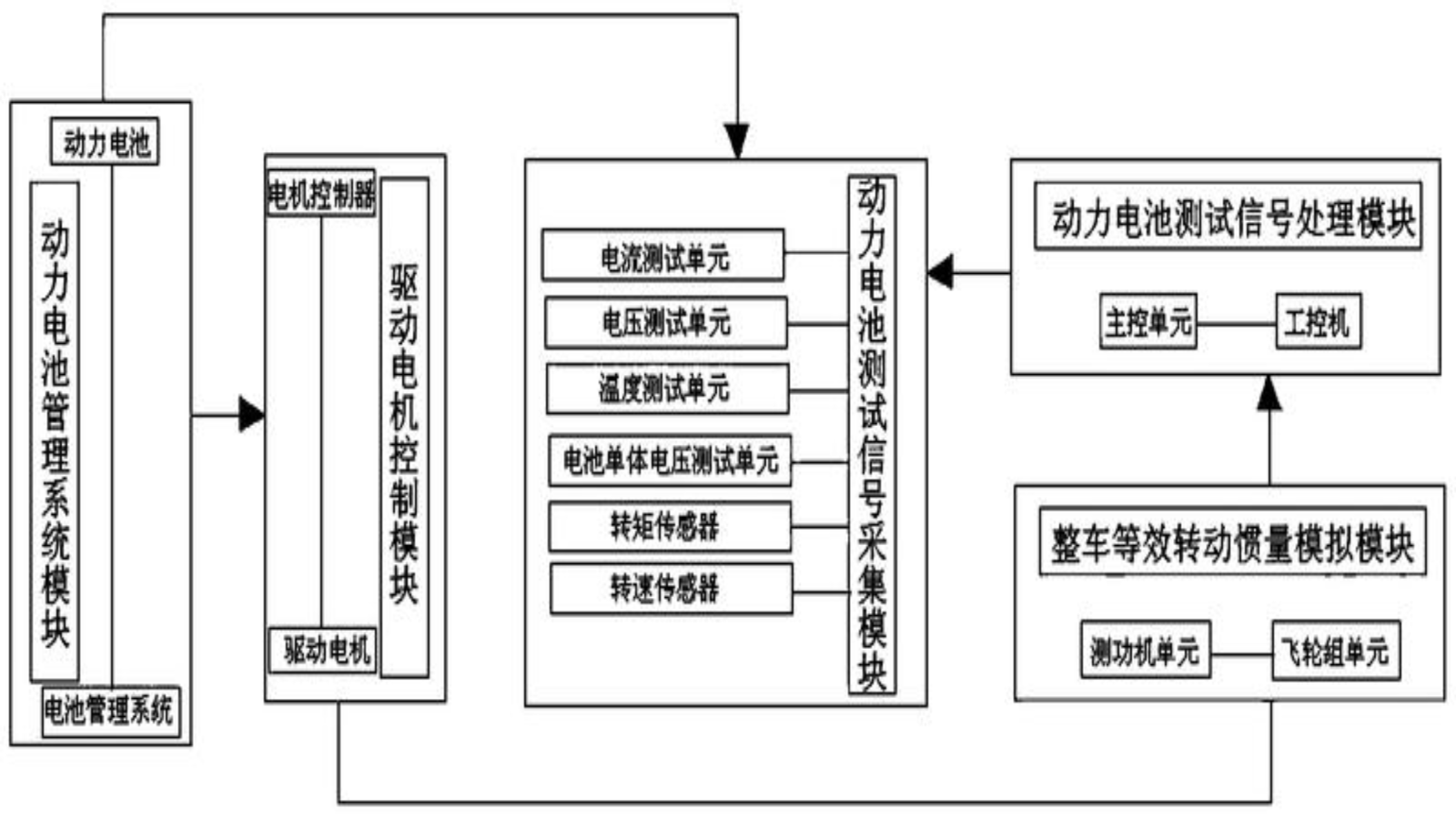
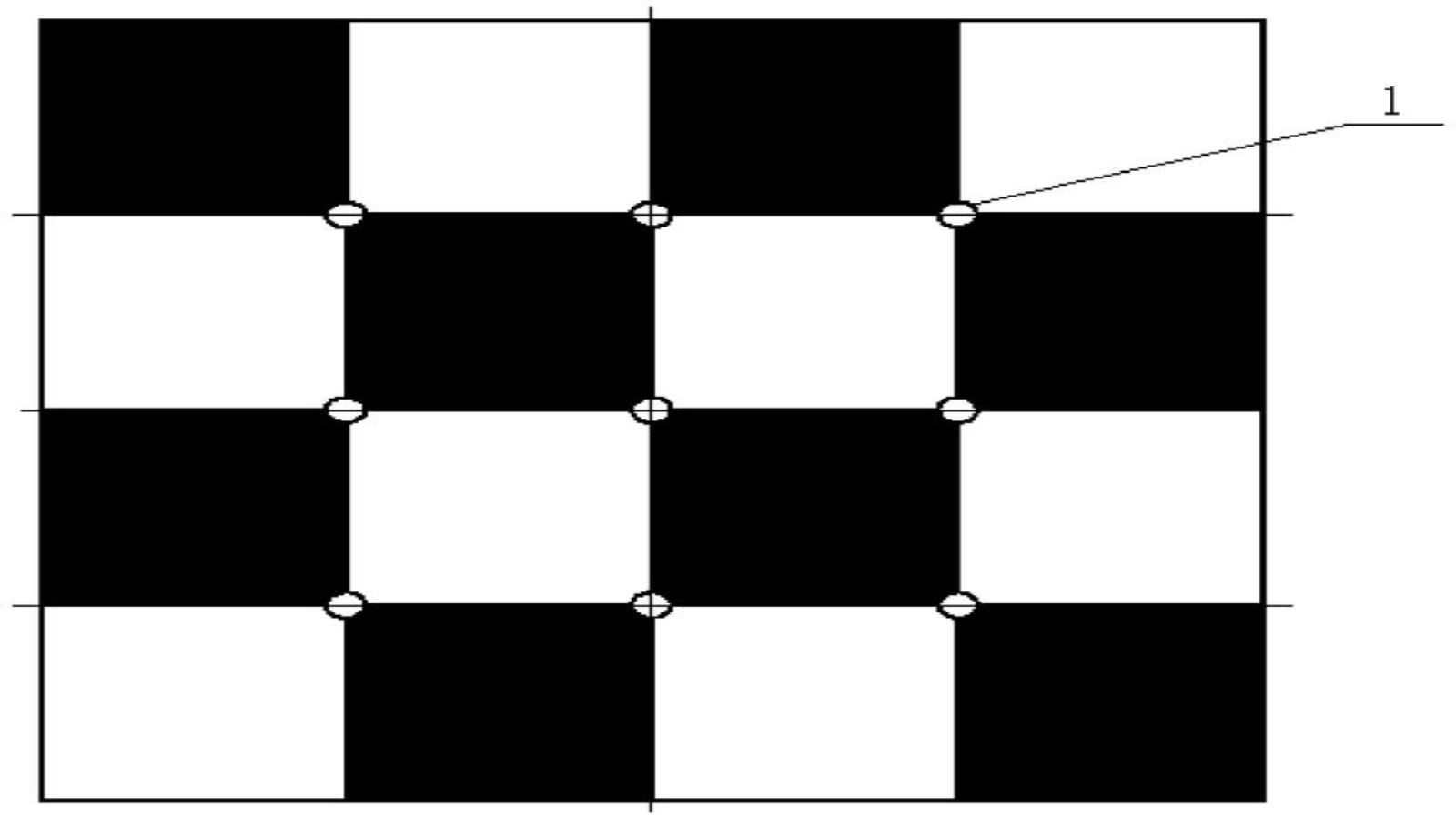
集模块用于采集被测动力电池目标状态量信息、动力电池测试信号处理模块用于处理被测动力电池目标状态量信息、动力电池管理系统模块用于控制被测动力电池输入输出状态、整车等效转动惯量模拟模块用于模拟电动汽车实际工况的以及驱动电机控制模块用于控制驱动电机运行状态;本发明弥补了传统动力测试平台的弊端,能够分别完成被测电动机或者动力电池的动态性能以及静态性能。
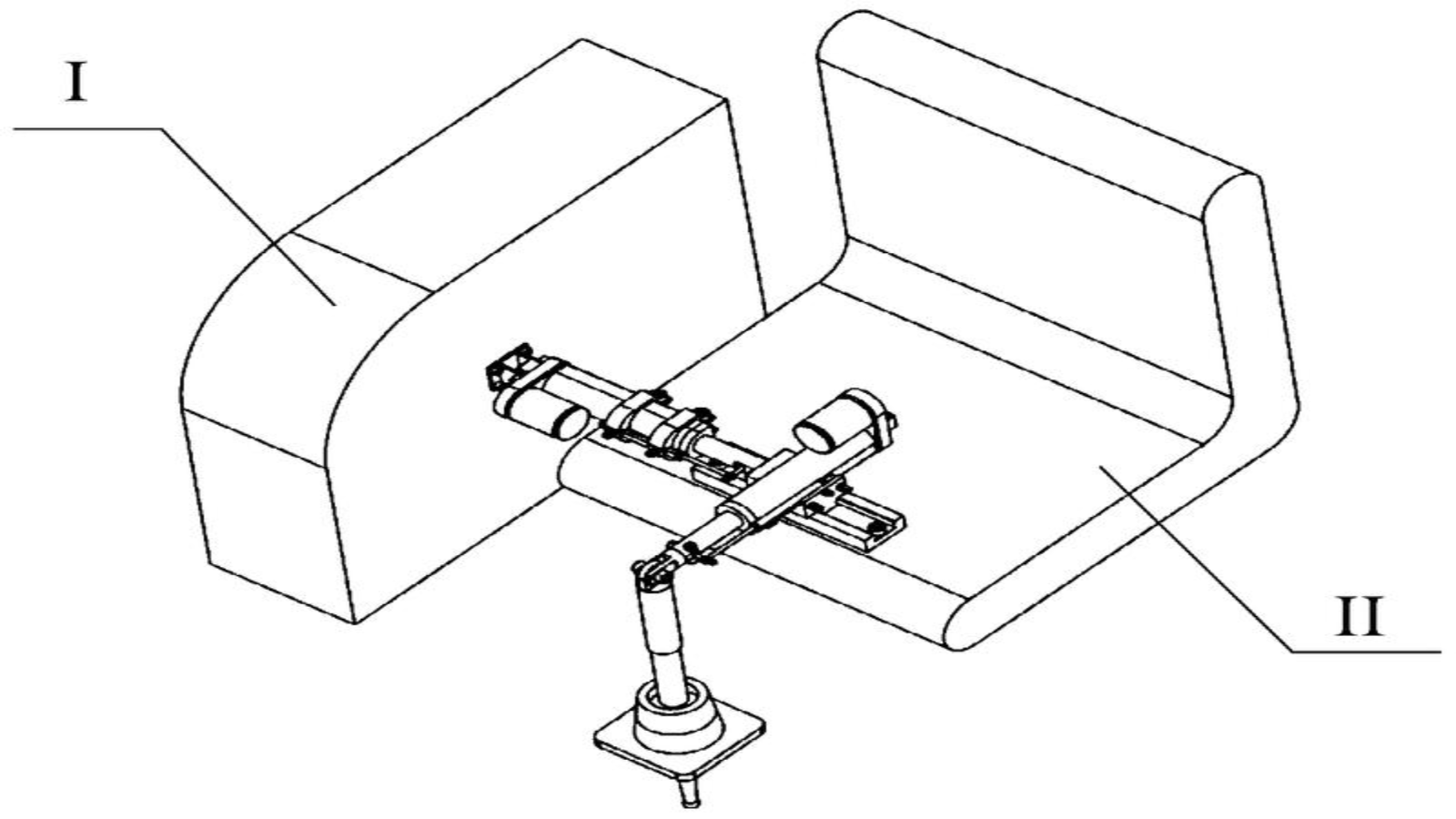
本发明涉及一种可精确控制的无人驾驶拖拉机自动换挡通用装置,包括横向和纵向驱动装置,横向驱动装置的另一端通过滑块可移动连接在导轨上,纵向驱动装置的另一端通过旋转接头与换挡套筒铰接,换挡套筒可移动套设在档杆上;本发明不需要改变原车的换挡结构,只需在原换挡结构上加装附属设备,提高了改装效率,降低了加工成本,适用于不同型号的拖拉机,具有一定的通用性。
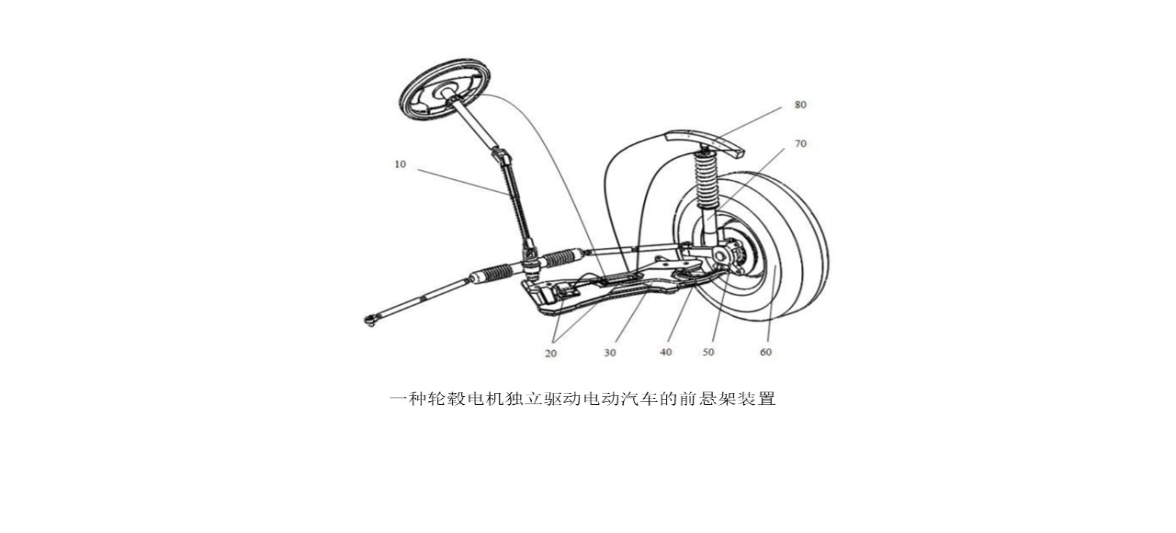
公开了一种轮毂电机独立驱动电动汽车的前悬架装置,包括转向系统总成、液压调节装置、副车架总成、下摆臂、转向节、车轮系统总成、减震器总成和液压缸,转向系统总成与转向节的转向梯形臂相连,副车架总成通过下摆臂与转向节下端相连,转向节上端的支架连接减震器总成,转向节固定在轮毂电机的电机轴上,前悬架装置还包括液压缸和液压调节装置,液压缸缸体固定在电动汽车上,两端各有一个通油口通过油管连接液压调节装置,液压缸内的活塞通过活塞杆和减震器总成固定连接。本发明能够综合根据汽车转速信号和转角信号平顺地自动调节汽车的主销后倾角,

一种无人驾驶拖拉机自动换挡通用装置,包括纵向和横向两个部分,纵向矩形换挡框通过螺栓与纵向电动推杆自由端固联;横向驱动装置包括套设在挡杆上的横向矩形换挡框和横向电动推杆,横向矩形换挡框通过螺栓与横向电动推杆自由端固联实现换挡,本发明实现了无人驾驶拖拉机自动换挡精确控制,稳定可靠,安装方便,不改变拖拉机原有结构,具有通用性。
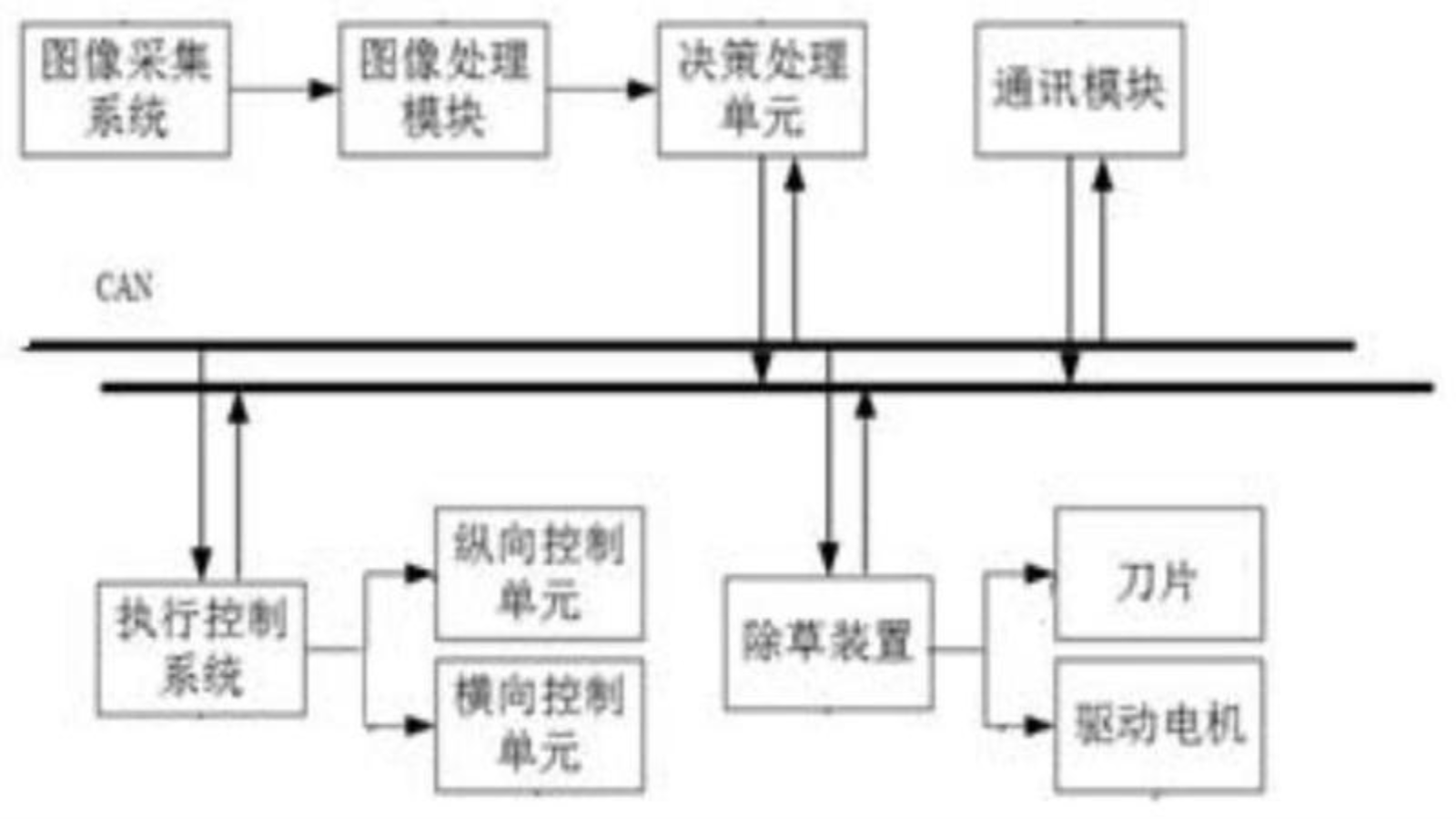
提供了一种一种果园自动驾驶除草拖拉机,实现拖拉机本体在果园行间杂草的一次性清除,在不借助昂贵的激光雷达以及全球定位系统的前提下,实现有限场景下的自动驾驶功能,具有成本低,固定作业场景稳定实现等优点,可普及性高。
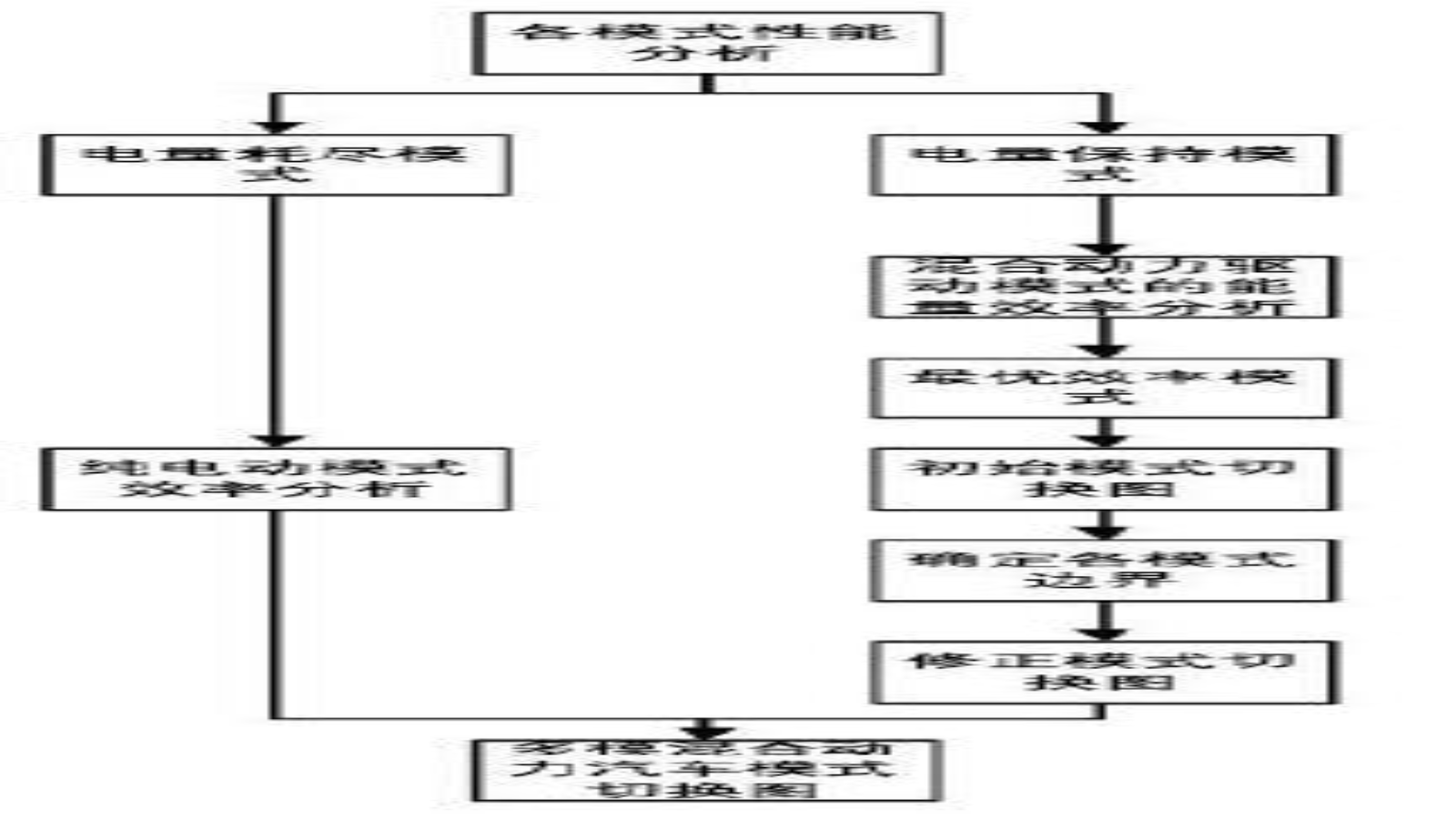
本发明提供了一种多模混合动力汽车模式切换图的正向设计方法,从能量效率、模式切换能量损耗与最大输出扭矩等多个角度对模式切换图进行讨论与分析,并从中总结出一套多模混合动力汽车模式切换图的正向设计方法。不仅能够提高车辆经济性,还能提高模式切换的平顺性,降低由模式切换引起的冲击与能量损耗。
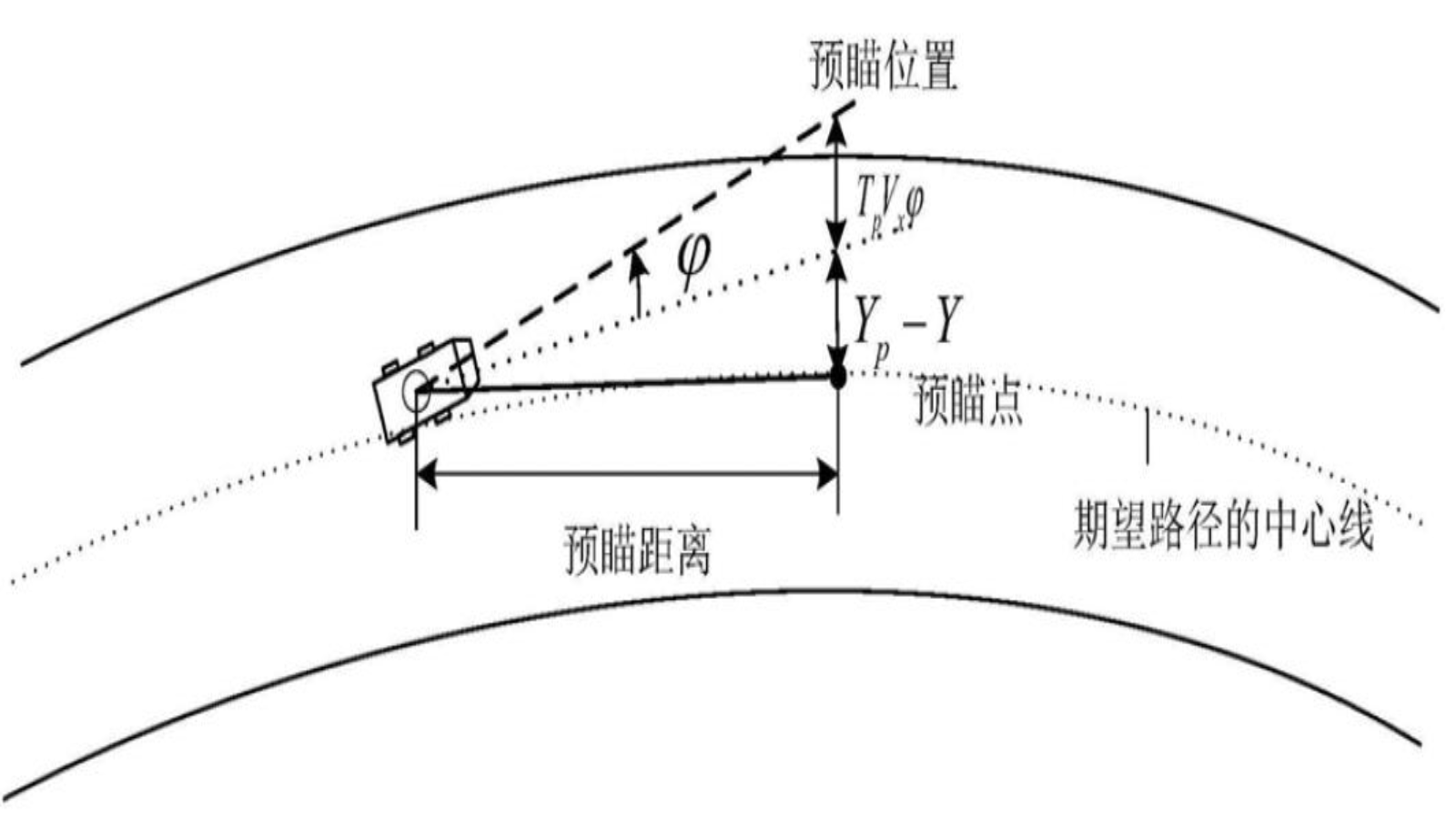
本发明公开了一种考虑驾驶员特性的差动辅助转向与共享控制系统建模方法。本发明的方法包括步骤(a)建立二自由度的车辆动力学简化模型和车辆质心位置在惯性空间下的坐标模型;(b)建立车辆轮胎的侧向力的简化模型;(c)建立车辆转向系统的转向柱动力学模型;(d)建立差动辅助系统作用下的驾驶员模型。本发明通过安装在转向柱上的转角传感器和扭矩传感器检测检测方向盘的角位移和作用于方向盘的力矩,将检测结果与车速、期望路径相结合,并考虑驾驶员特性按照一定的控制算法控制轮毂电机输出相应的差动力矩来辅助驾驶员更好的驾驶车辆。

提供了一种一种纯电动方程式赛车整车电气系统,实现赛车的动力系统、高压电安全、硬件预警保护等控制,解决了电动赛车线束布置复杂、CAN信号抗干扰能力弱、电气系统的鲁棒性差等问题。