

本系统是对现有危化品运输车进行改进,并有机的将纵横向防波板系统、自动抗侧倾 液压平移系统、侧翻安全气囊系统有机整合为一体。系统综合了机械设计与优化、传感器技术、液压技术和自动控制技术等多方面技术,起点水平高。系统实施后,将影响现有危化品运输车市场格局,一方面填补了国内外危化品运输车侧翻防护方面的技术空白,另一方面显著降低侧翻事故的发生概率,提高危化品运输车公路运输的安全性。
与电池电极过程特性紧密相关的阻抗可为电池健康状态估计、寿命衰减诊断以及 析锂、过充、过放、温度异常等故障诊断提供重要依据,使电池管理系统 (BMS)更加智能,对电池监管也更加全面。而阻抗测量方法和系统的缺失限制 了阻抗在BMS 中的应用。针对该难题,发明了在行驶过程中动态工况以及充电过 程中稳态工况中的阻抗快速计算方法,发明了兼容现有BMS 架构的阻抗测量系 统,实现了宽频阻抗的准确获取,为基于阻抗的智能BMS 奠定基础。
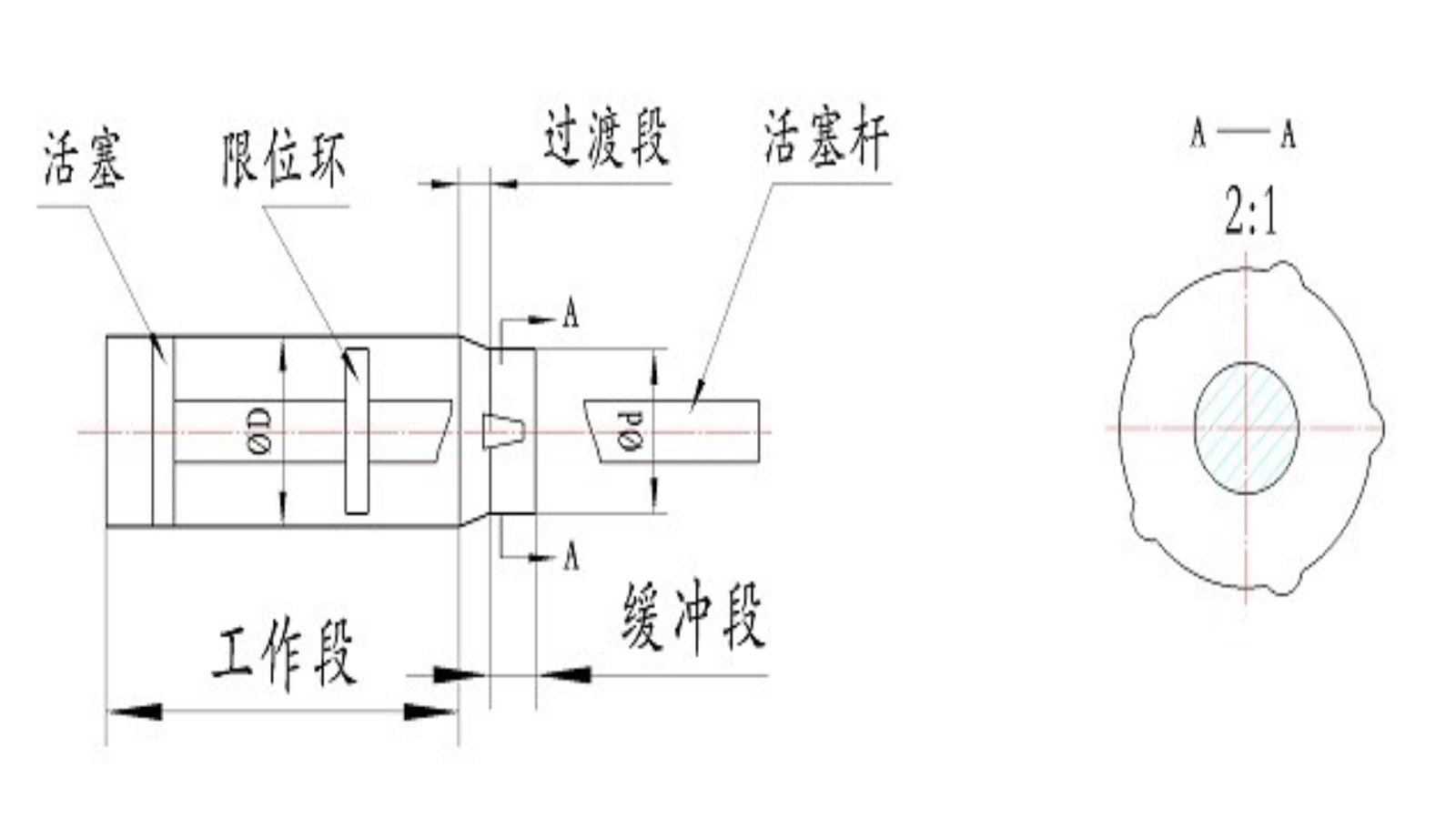
(1)采用液压限位缓冲结构代替传统橡胶块缓冲结构,不仅保证了极限位置的限位缓冲功能,同时提高了缓冲结构的使用寿命。 (2)采用缩径液压限位技术,避免了拉伸极限位置时减振器活塞与其导向套的刚性撞击,即提高了悬架在极限位置的减振性能,又实现了与不同类型悬架性能要求的合理匹配。 (3)采用双活塞液压限位技术,在减振器极限位置产生附加阻尼,避免了减振器活塞与其导向套的刚性撞击,同时改善了汽车在恶劣路面上的行驶平顺性。并通过调整浮动活塞上细长孔的数量及端面尺寸调整附加阻尼的大小,实现附加阻尼力与使用工况的合理匹配。
四轮独立电驱动汽车集成控制软件采用分布式集成控制方式,集成控制软件加载在整车控制器中,通过软件的运行使整车控制器发出相应的控制指令,来分别控制四个转向电机控制器、四个驱动电机控制器和液压控制单元的动作。分布式集成控制的集成程度高,有新的子系统加入不需要对软件程序进行颠覆性的修改,各个子系统可以单独设计,融合性强,缩短了整车控制策略的开发周期,是实现整车控制的理想选择。
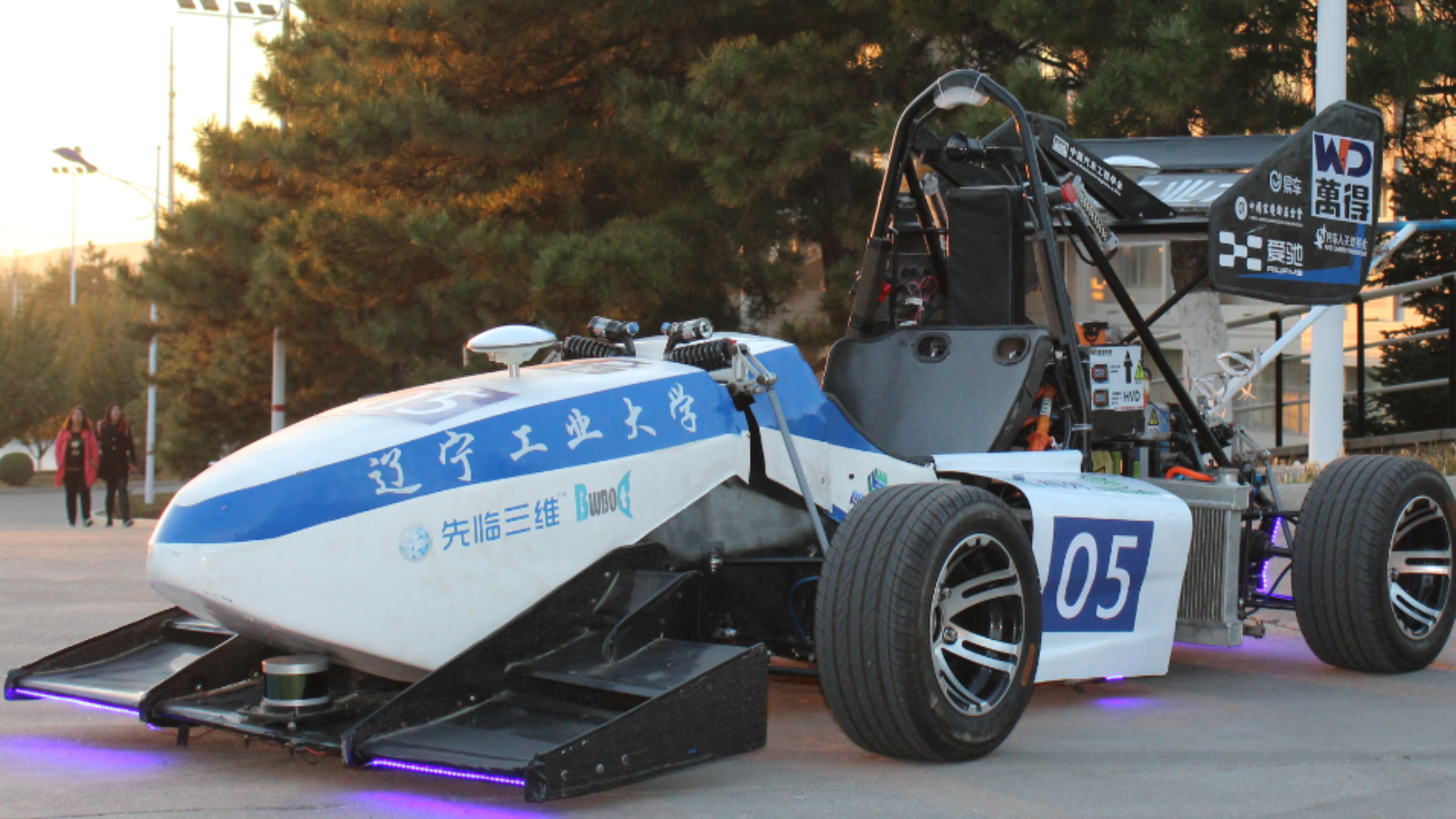
(1)驱动与传动系统高度集成化,左右驱动桥可独立拆装且轻质高效,采用行星齿轮减速箱传动效率高大97%以上。 (2)采用碳纤维不等长横臂四轮独立悬挂,质量轻强度高。 (3)采用碳纤维复合材料空气动力学套件,在90km/h的车速下可提供不小于600N的下压力,赛车高速下操控性能优越。 (4)双电机驱动力矩可以独立控制,可实现牵引力控制算法TCS的验证、驱动横摆力矩控制算法DYC的验证。 (5)自主开发整车电控系统、环境感知和路径规划算法。
面向车身结构概念设计阶段研发了集车身结构设计、分析和优化的一体化软件系统。系统采用深度学习算法和模板技术实现了多种车型结构智能化建模;采用自主CAE求解和外接求解器,可求解刚度、模态和碰撞工况;创新了多车型共享模块优化算法,支持车身平台化和多学科设计。该软件系统获得了中国汽车工业科技进步二等奖,已应用于多种量产车型设计。
解决共享汽车、租车、汽车金融、车队等典型应用场景下的丢车问题,通过终端内的LoRa通信系统和云平台,实现复杂电磁干扰环境下的车辆定位服务。目前已经开发出监控平台和原形产品,授权了3项国家发明专利。



