
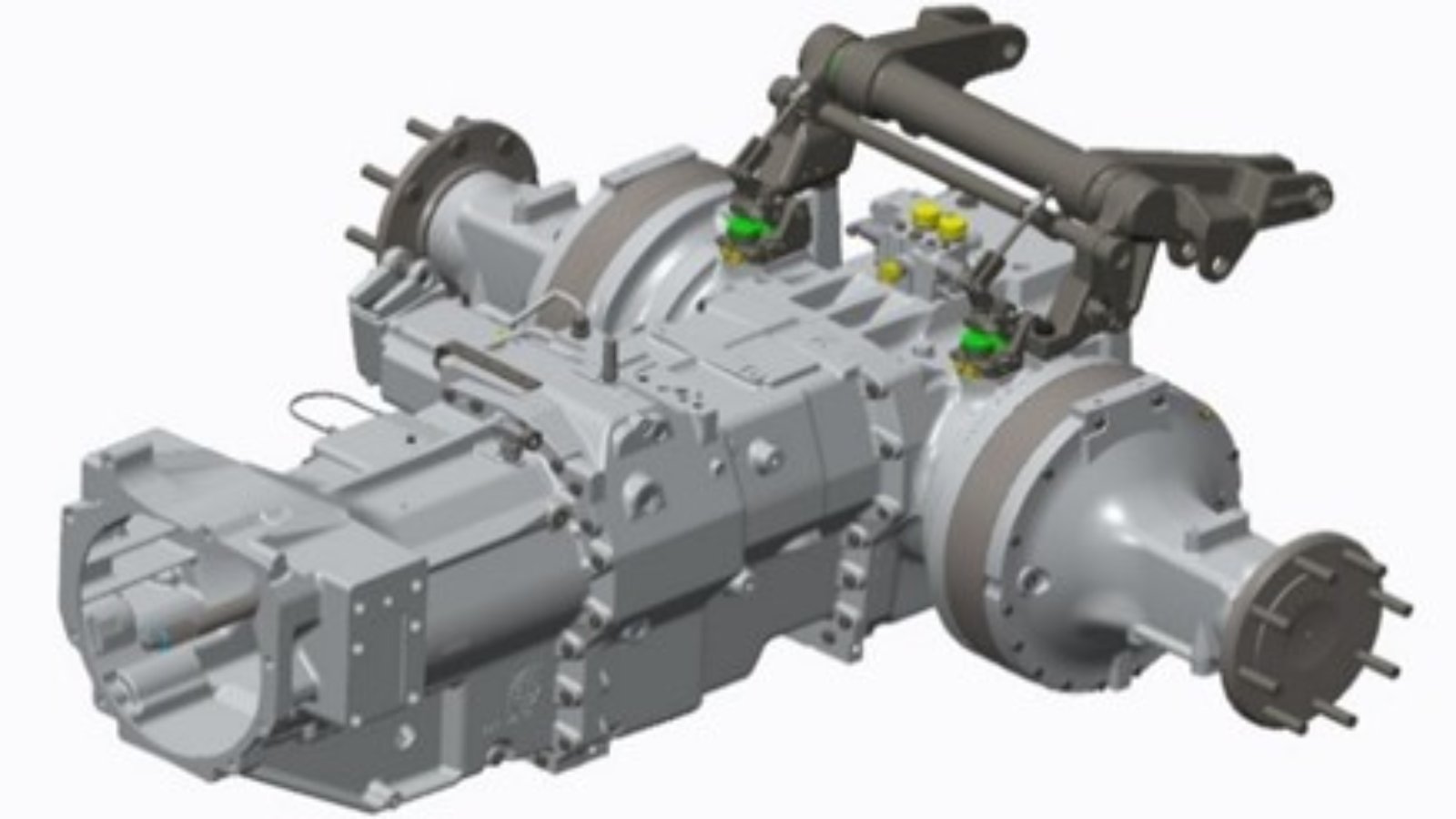
根据目标车型需求,进行动力换挡变速传动系统设计开发、电控系统(TCU)设计开发,形成工程/农业机械动力换挡自动变速控制系统。

本成果针对无死区三相AC/DC双向变流器,研究了其关键技术,针对桥式拓扑存在桥臂直通这一问题,在不增加可控开关器件的前提下,研究无死区AC/DC变流器拓扑的生成规律,提出了一种无死区变流器拓扑的生成方法,并利用该方法生成了双Buck/双Boost拓扑,采用半周期控制方式以提高效率,提出了一种抑制电流过零畸变的控制方法,通过纹波电流负反馈改变三相电流过零点附近的基准信号,从而减小导致过零畸变的高频纹波电流。

智能前大灯系统通过摄像头及目标检测算法对前方车辆及行人进行识别,根据识别结果对汽车远光灯进行自动控制,有选择性地遮蔽远光灯光束范围,让光束避开对面车辆,在确保驾驶员清晰视野的同时,不会影响对向来车的行驶,使驾驶员不需要频繁切换远近光去避免前方眩目,提升夜间行车安全。

接触网作业车智能辅助驾驶系统实现在监控、调车等场景下替代驾驶员对作业车进行智能控制,实现作业车自动驾驶,或辅助司机进行驾驶工作;保证作业车平稳安全运行且符合限速要求;实现在库内短距离遥控控制车辆前进后退至指定位置停车;实现驾驶员在非驾驶位短距离移动车辆。具有紧急切换功能,实现紧急状态下司机接管车辆控制。
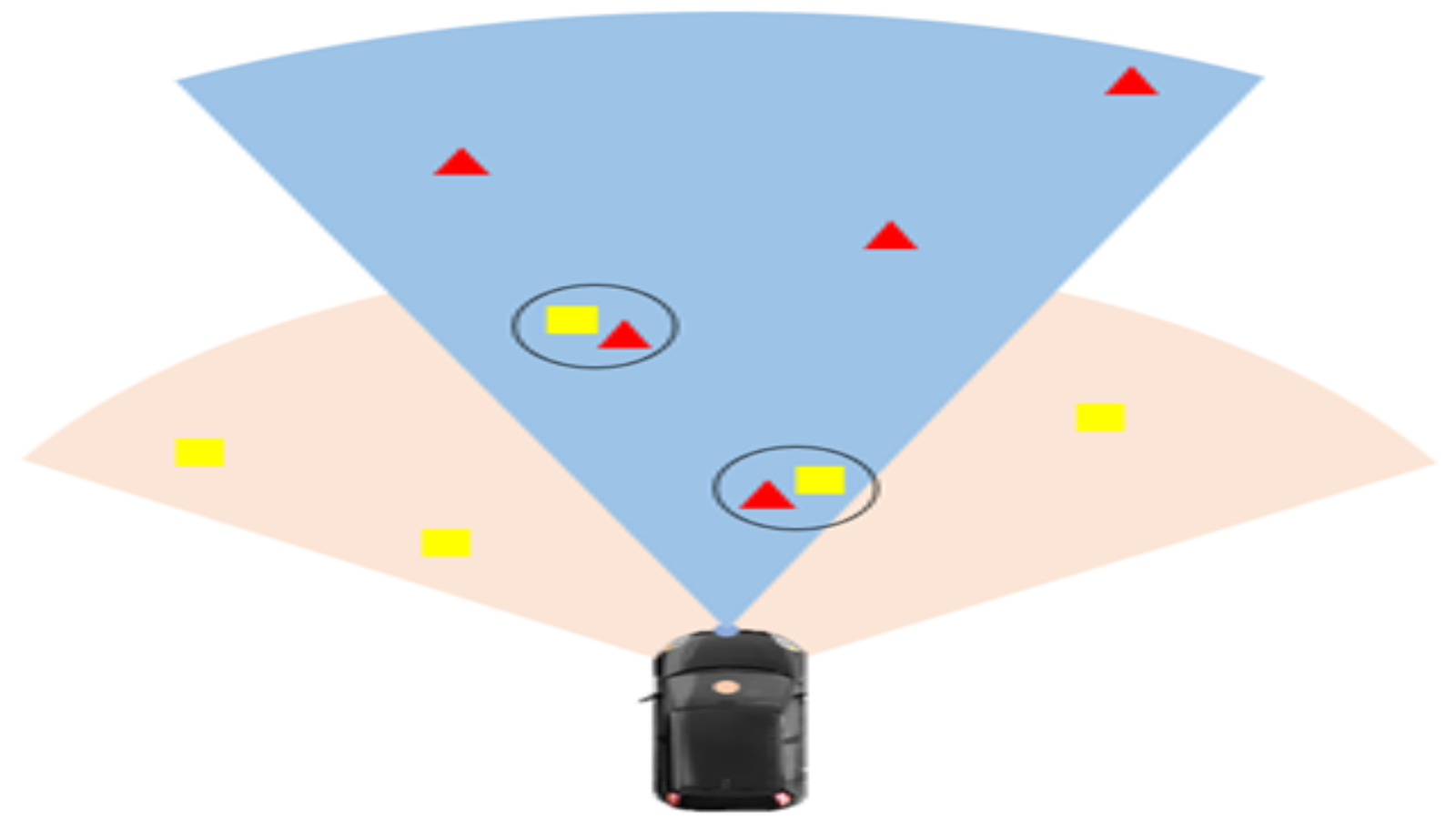
随着大数据、云计算和 5G 技术的成熟, 智能驾驶快速发展。车辆识别是智能驾驶的重要技术之一,针对传统单一传感器方法识别效果差、易受干扰等缺点,利用毫米波雷达与摄像头实现对路面障碍物的检测与定位。

无人驾驶拖拉机是在现有传统拖拉机上做出改进、拓展和创新,对无人驾驶技术、智能作业与传统拖拉机进行一体化融合,实现智能作业无人驾驶拖拉机自动路径规划导航、智能作业、全工况内无人驾驶,增加亩产、降低投入,全面提升农机行业自动化、信息化、智能化程度。

智能纯电动汽车融合智能汽车的安全性与舒适性以及电动汽车节能环保的优势,对环境感知层的机器视觉、激光雷达、毫米波雷达和V2X等数据信息进行融合后,根据车辆自身状态及车辆周边环境决策判断车辆驾驶模式,综合实现车辆自动驾驶需求。


