(1)发明的磁流变电控减振器/悬置大幅度提升了磁流变液的有效使用率,降低了应用成本;经实验测试标定,执行器响应时间<15ms。 (2)开发的电控减振器在匹配自主开发控制器后,提升了采用被动悬架的某量产车型平顺性20%~40%、操稳性10%~15%。 (3)电控减振器及其系统动态特性测试系统(包括响应时间自标定系统、动态可控力特性评价系统)、非线性控制系统均已完备。

提供面向城市道路、高速公路、城郊道路等开放道路的自动驾驶功能开发集成。安装激光雷达、超声波雷达、毫米波雷达、GPS、摄像头、高精轮速传感器等,安装工控机和主动转向、制动控制器,改装轮毂驱动电机,实现智能电动汽车平台。在城市道路、高速道路、城郊道路等实现自动驾驶功能开发。
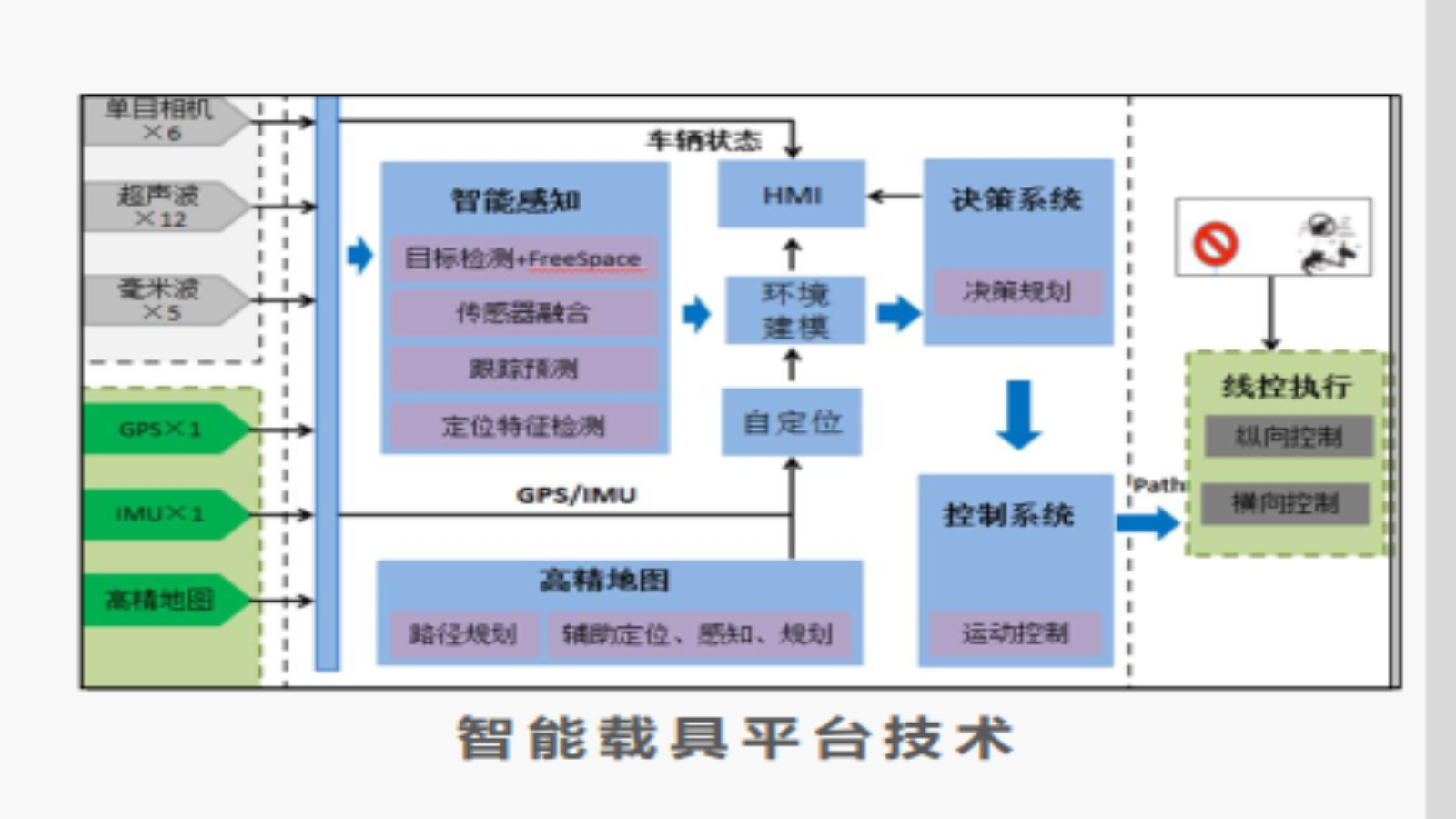
提供面向厂区、机场、 物流园等特定场景的工程车辆自动驾驶功能开发集成。采用单目相机、超声波雷达、毫米波雷达、GPS/IMU作为传感器与高精度地图相结合,实现目标检测、传感器融合、跟踪预测、定位特征检测,实现决策规划与运动控制。在园区无人物流、无人商用客车、景区无人巡逻车和机场无人牵引车上均可应用。

提供基于“虚拟场景+传感器+车辆+计算平台”的定制智能化测试平台产品、技术服务,并支持全工具链的应用与二次开发指导培训。 工控机采集处理与发送各控制信号,转矩传感器采集驾驶员实时转矩信号,转角传感器采集方向盘转角信号,转向管柱在主动转向时带到方向盘转动,制动部件有制动盘和制动钳。 主动制动控制器发送制动指令,外接显示器实时显示试验效果,上位机编写控制程序,主动转向控制器控制转向电机转动,伺服电机模拟回正力矩。 应用于自动驾驶系统功能测试。

自主开发的车辆液压同步转向控制系统是国内首次实现液压系统同步转向功能,实现工程车辆、重型车辆、农业车辆同步转向功能,可极大地降低车辆操作人员的劳动强度、提高驾驶员的安全性以及方向感,提高操纵稳定性、打破国外的技术封锁,提高国内液压转向车辆同步转向水平,形成自主知识产权的同步转向产品。

新能源汽车整车控制器VCU从硬件、基础软件、应用层策略、BootLoader、程序刷写软件,全系列硬软件均开发,目前已经给国内主机厂实现批量供货,配套车型超过5个。
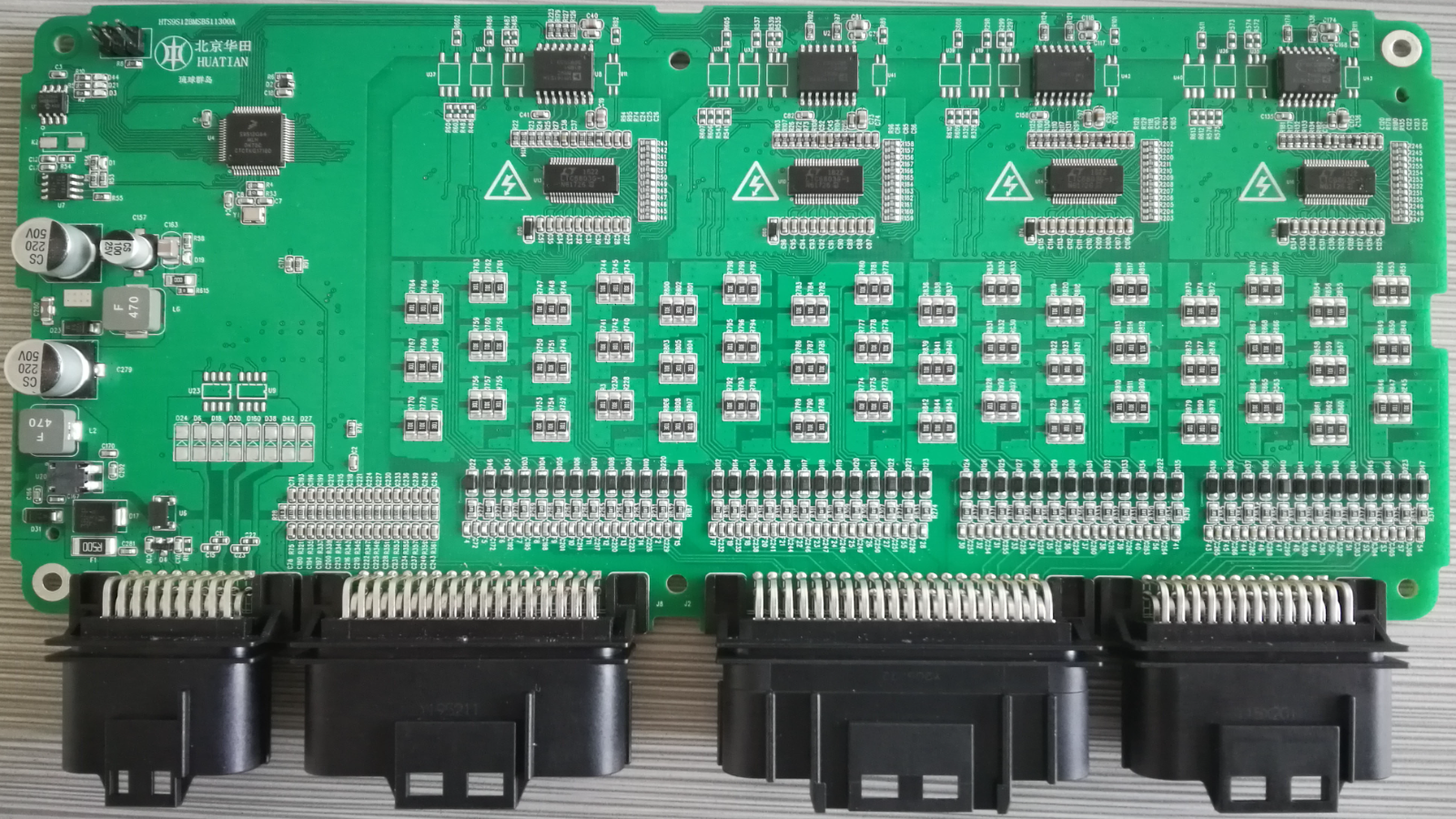
新能源汽车电池管理系统BMS包括主板和从板,从硬件、基础软件、应用层策略(基于Simulink模型开发)、BootLoader、程序刷写软件,全系列硬软件均开发,目前已经给国内主机厂实现批量供货,配套车型超过5个。