

针对电动及混合动力汽车形成了集构型方案、节能机理、控制策略、仿真技术和试验测试为一体的理论及工程应用体系。提出的基于车辆运行特征的混合动力系统多因素参数匹配方法,充分考虑了系统效率、控制策略、部件等多重限制,以匹配得到最佳系统方案;可根据用户特定需求,针对不同系统进行导向性的动力性和经济性计算与分析,从节能机理出发,深入挖掘节能潜力;拥有成熟的混合动力系统控制软件架构,涵盖信号处理、故障诊断、电管理、附件控制、能量管理和动态协调等多种功能模块。所研究的行星混动系统及相关设计、控制理论和技术成功应用于宇通插
在轮毂电机驱动系统方面具有动力系统、驱动系统、整车集成、整车控制等一系列成熟技术成果,可提供交钥匙工程服务
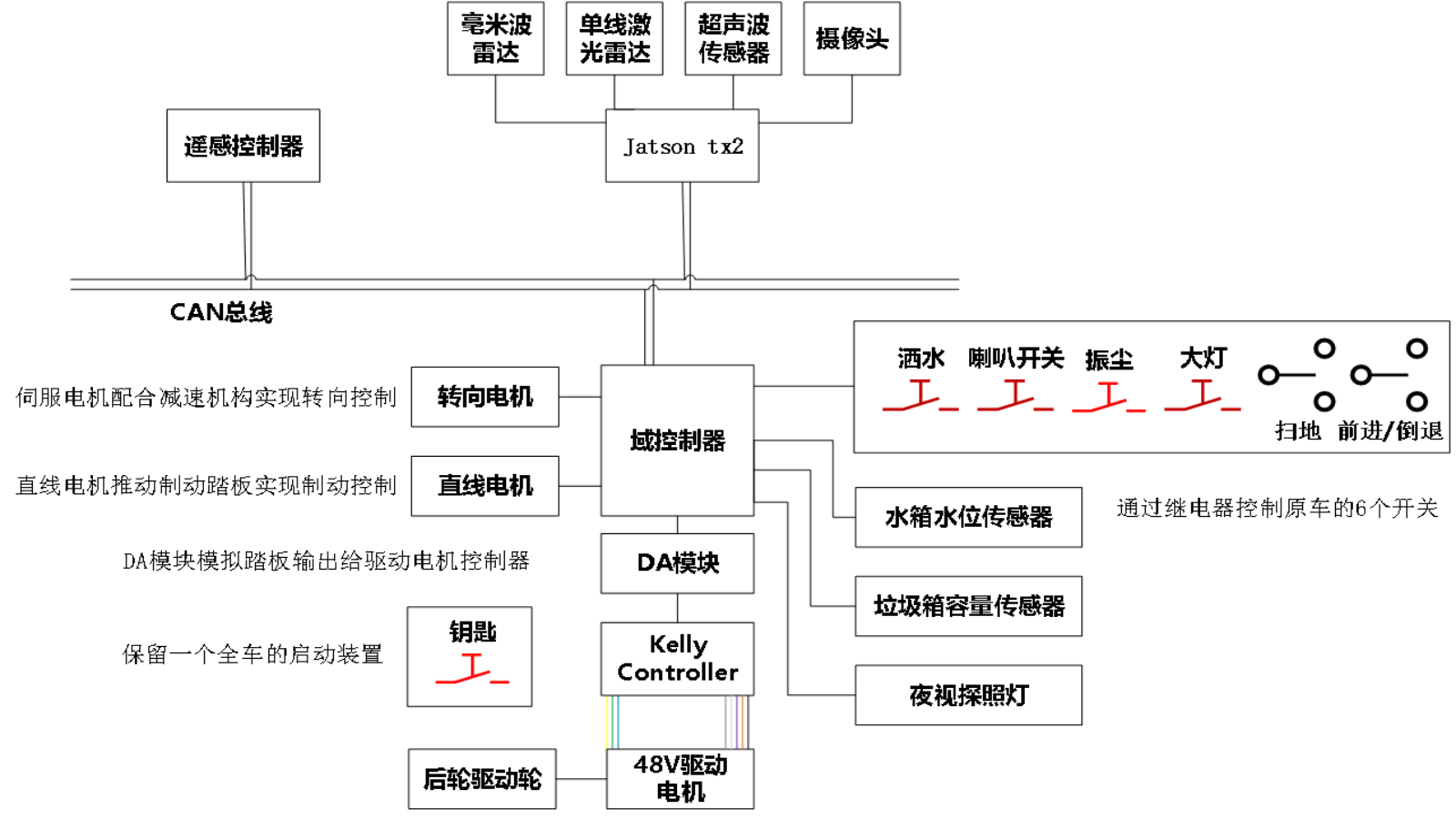
基于电动清扫车平台,提供具备量产前景、高性价比的智能网联驾驶组件及平台设计方案,从而将现有的机械化清扫升级换代为无人驾驶的自动作业机械化清扫。 • 基于现有在售车型,提供自动驾驶套件的前装设计方案。 • 针对新一代无人驾驶清扫车,开发全新的低速无人驾驶底盘运动平台。 • 从机电液控制角度,协助清扫车企业升级产品研发能力,优化清扫作业机构。

现有的汽车A柱结构势必导致驾驶员前方视野存在盲区。汽车A柱透视化车载显示装置通过摄像头采集车辆外部环境信息,并通过视觉算法的整合处理,将适应驾驶员的被A柱遮挡的驾驶图像通过布置于车辆A柱位置的LED显示屏实时显示。在确定驾驶员视角的条件下,准确快速的计算出驾驶员对应盲区位置,进而通过透视、仿射等变换在对应的位置补偿A柱盲区图像。本成果建立了汽车行驶环境的自然视野图像融合算法,具有计算量小、实时性好、适应性强的特点,可以在不同车型上快速的实现匹配。

自1996年成功研制“世界先进、亚洲领先”中国首台开发型汽车驾驶模拟器以来,不断研制车辆动力学模型、集成技术等核心技术,研制出开发型、研究型和桌面型等系列化汽车驾驶模拟器产品,达到量产产业化水平。可提供高逼真度的汽车虚拟驾驶环境,将驾驶员的主观评价与人车交互动态的复杂交通环境引入到新一代汽车产品开发中,替代实车场地试验实现对整车及电控系统的测试、验证和标定,大幅缩短汽车开发周期、降低开发成本。

高逼真度车辆动力学建模工程服务可以为企业提供指定车型的建模参数测试、参数处理、整车场地测试、模型调试与验证,建立指定实时车辆动力学软件(包括吉林大学车辆动力学模型、carsim、carmaker、vedyna、car-realtime)逼真度达到85%以上的实时车辆动力学,可用于整车运动动力学性能仿真、分析和优化匹配,底盘电子电控系统、智能汽车控制器的测试、验证和标定。


