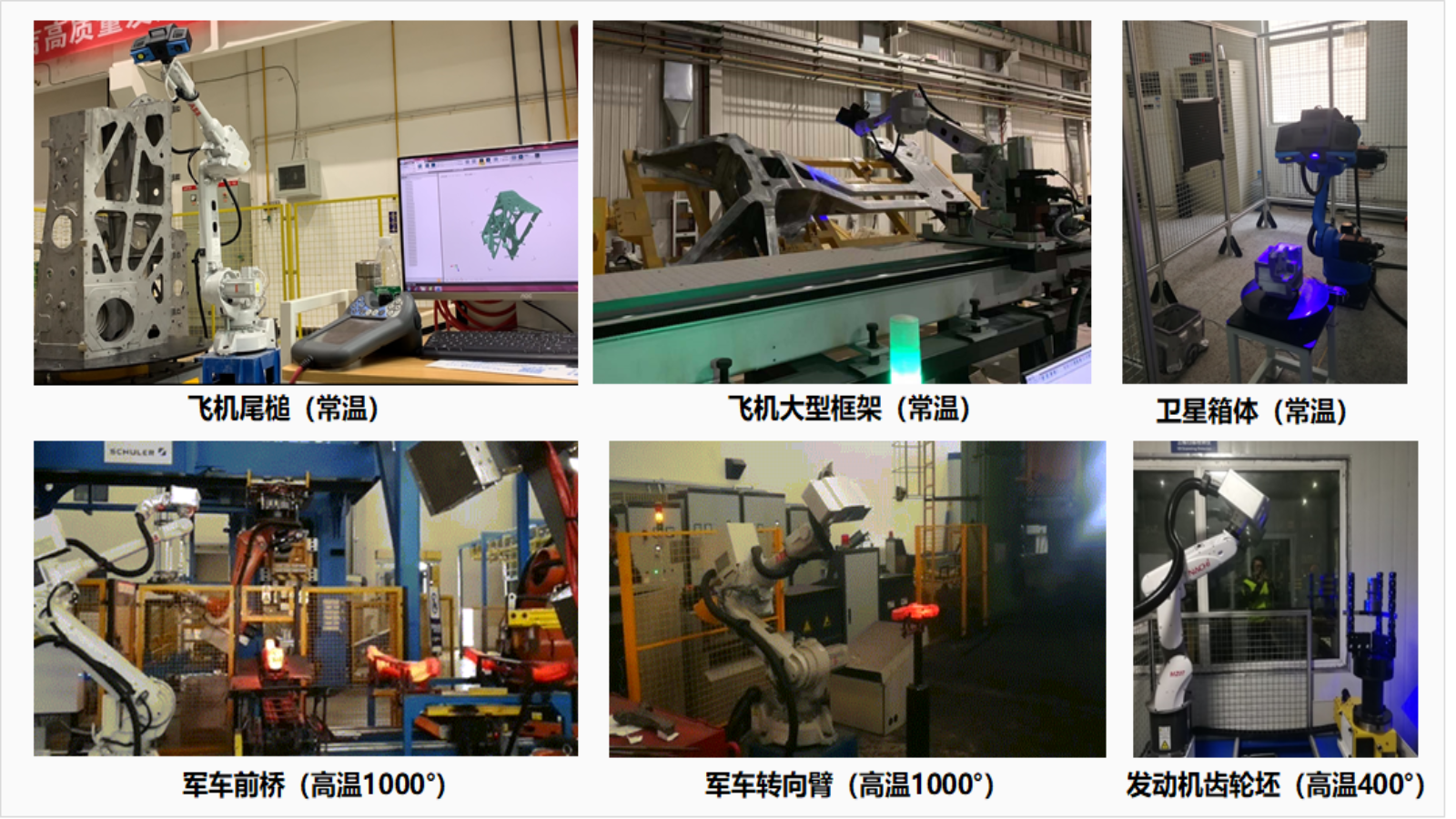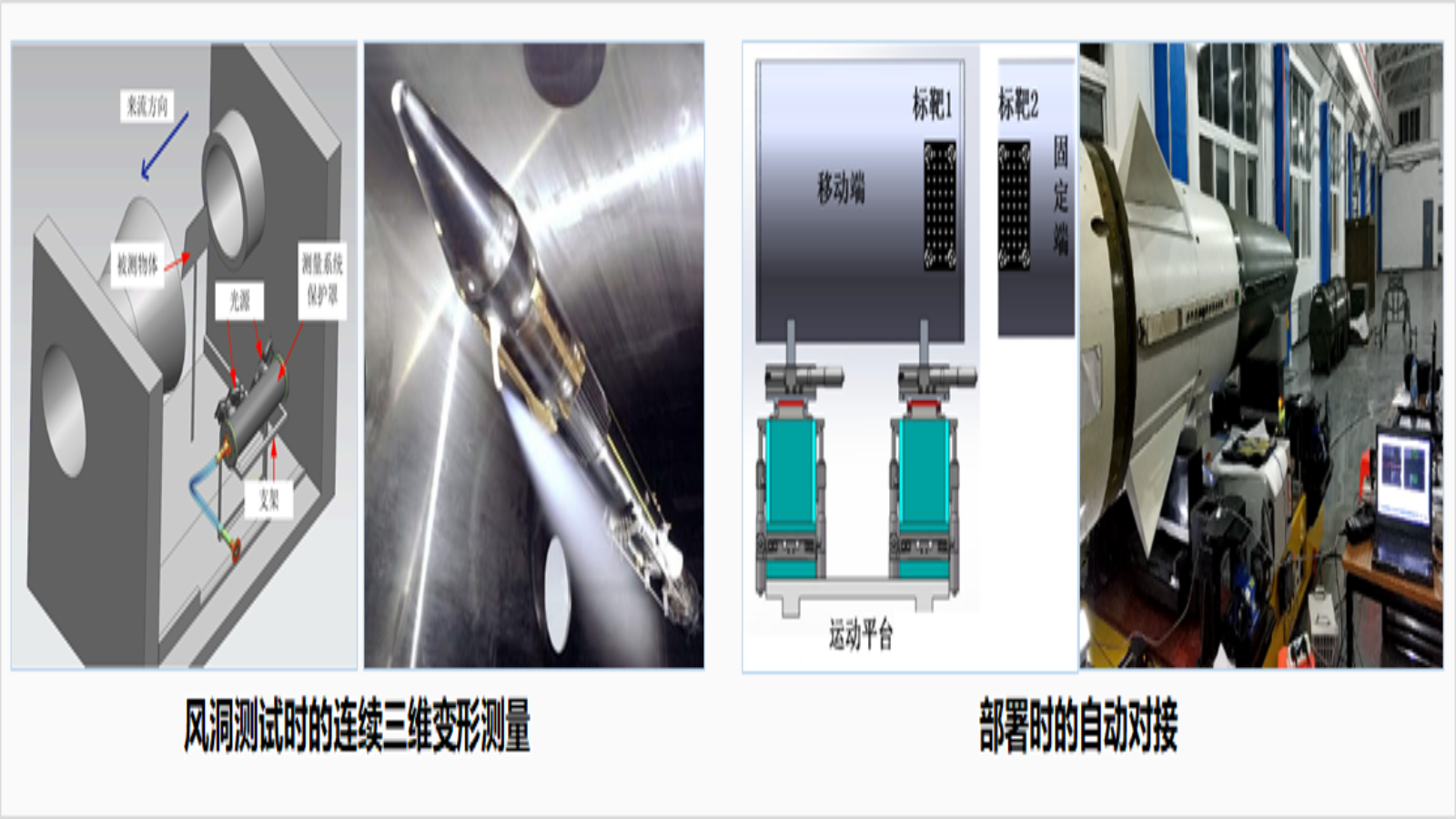
面向航空航天等领域关键零件工作状态下的变形、位移与姿态三维测量需求,攻克了高分辨率相机阵列测量方法、外部参数校准引导的振动分量去除方法等关键技术,研制了系列动态三维变形与视觉跟踪装备,成功应用于多种型号导弹等关键武器装备的设计研制和安装部署,国内首次在高超声速试验段内实现了模型三维变形和姿态的高精度测量;还实现了弹体的自动化、高精度、高可靠对接,极大缩短了对接时间,提升了部队的快速反应能力。
航空航天等领域关键零件工作状态下的变形、位移与姿态三维测量,能为零件的运行性能分析和结构优化设计提供重要基础数据。例如:大型飞机中的大展弦比机翼,在亚音速巡航时变形大,为了保证飞行承载能力、续航能力和飞行安全,必须在风洞试验中对大型飞机模型的变形、位移与姿态进行精确的三维测量。原有方法是在零件表面或内部安装测量传感器,存在操作复杂和测量稳定性差的缺点。视觉三维测量技术具有非接触、精度高、数据丰富等优势,但在应用过程中还存在以下难题:① 零件运动变形范围大、速度块,测量时难以兼顾测量分辨率和测量速度;②测量现场普遍存在强烈振动,导致位移、速度等参数测量精度低。为此,项目团队进行了以下创新:
(1)基于高分辨率相机阵列的动态物体快速三维测量方法。构建了基于多视几何原理的多相机坐标系融合模型,提出了多相机阵列动态物体三维变形测量方法,解决了图像分辨率与图像采集速度无法兼顾的难题,实现了高速、高精度的三维立体视觉测量。
(2)基于相机外部参数实时校准的振动分量去除方法。构建基于非单位四元数的无约束化外部参数模型,提出基于二重对称多项式求解的外部参数优化算法,实现了环境振动参数的逆向求解,解决了环境振动导致位移、速度计算不准确的难题。
(3)高分辨率相机阵列控制装置。发明了集外部密封、内部温度监控、机械减震等功能的复杂零件动态三维变形测量装备,装备的测量精度达到±0.03mm+0.05mm/m,测量范围达到3m×3m×1m,测量速度可随相机的数量增加而增加。
研制出系列动态三维变形与视觉跟踪装备,成功应用于多种型号导弹等关键武器装备的设计研制和安装部署。在设计研制阶段,采用研制的动态三维变形装备,国内首次在风洞内部实现了弹体连续三维变形和姿态数据的高精度测量,为气动性能分析和结构优化设计提供基础数据,解决了传统测量方法操作复杂并影响模型气动性能的问题;在安装部署阶段,采用申请人研制的视觉跟踪装备,实现了弹体的自动化、高精度、高可靠对接,极大缩短了对接时间,提升了部队的快速反应能力。