
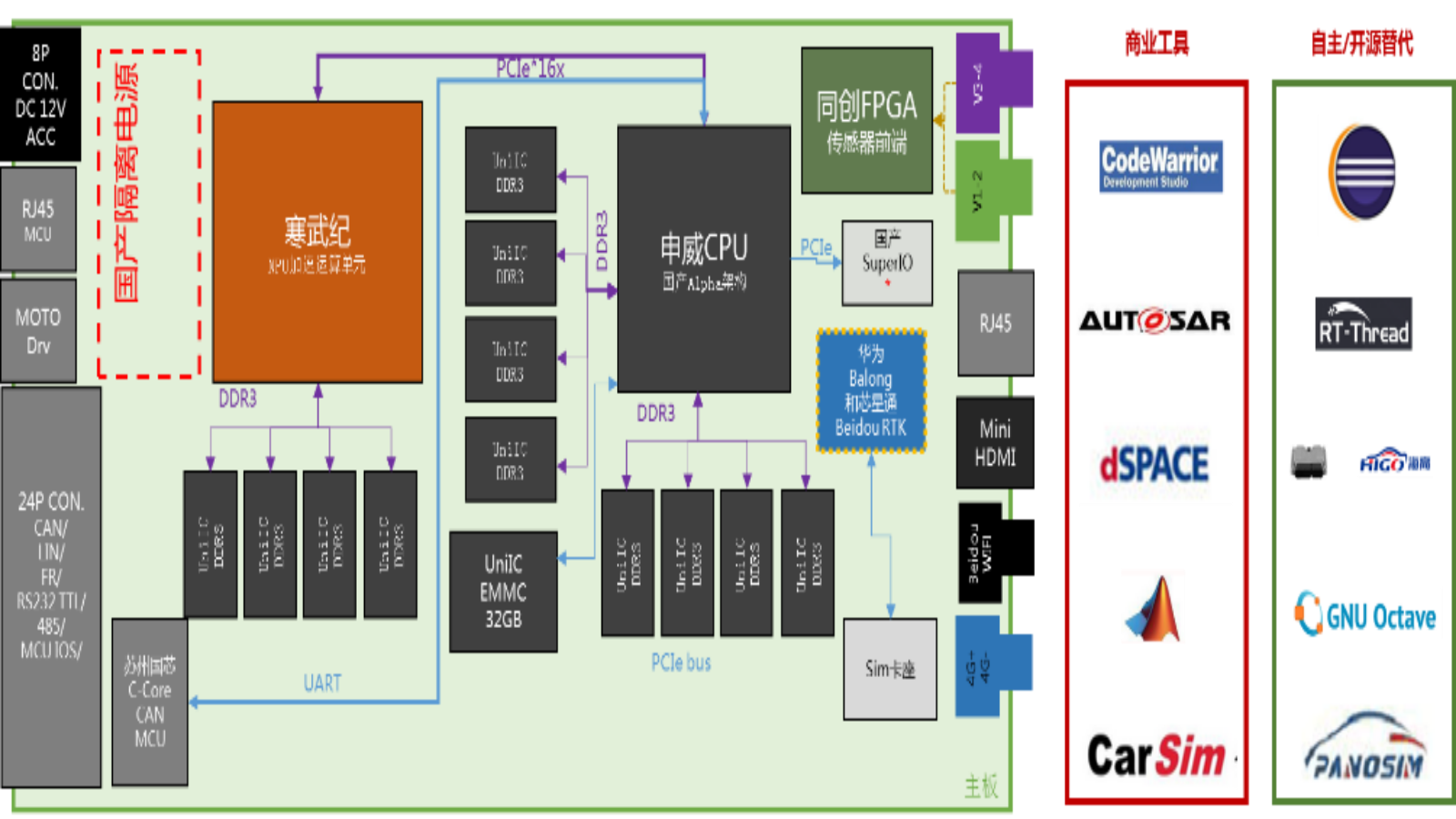
瞄准中国自主可控智能网联汽车计算单元的国家战略需求,开展中国设计中国制造的智能网联汽车专用高性能控制器研发。 • 智能汽车中央域控计算平台:实现视觉、雷达、高精定位等多传感器信息融合、可行驶区域动态建模及预期行驶轨迹多目标决策。 • 智能汽车底盘运动控制平台:实现汽车运动控制和底盘线控化。

本成果核心包括四轮转向控制和后桥线控转向结构关键技术。四轮转向控制包括后轮随动式控制、前馈/反馈+失效容错式控制和后桥线控转向+分布式四驱差动转向的协同控制。后桥线控转向结构关键技术包括低成本后轴转向驱动方案、后桥线控转向弹簧自回正方案和一种可实现理想阿克曼转角关系的汽车转向系统。
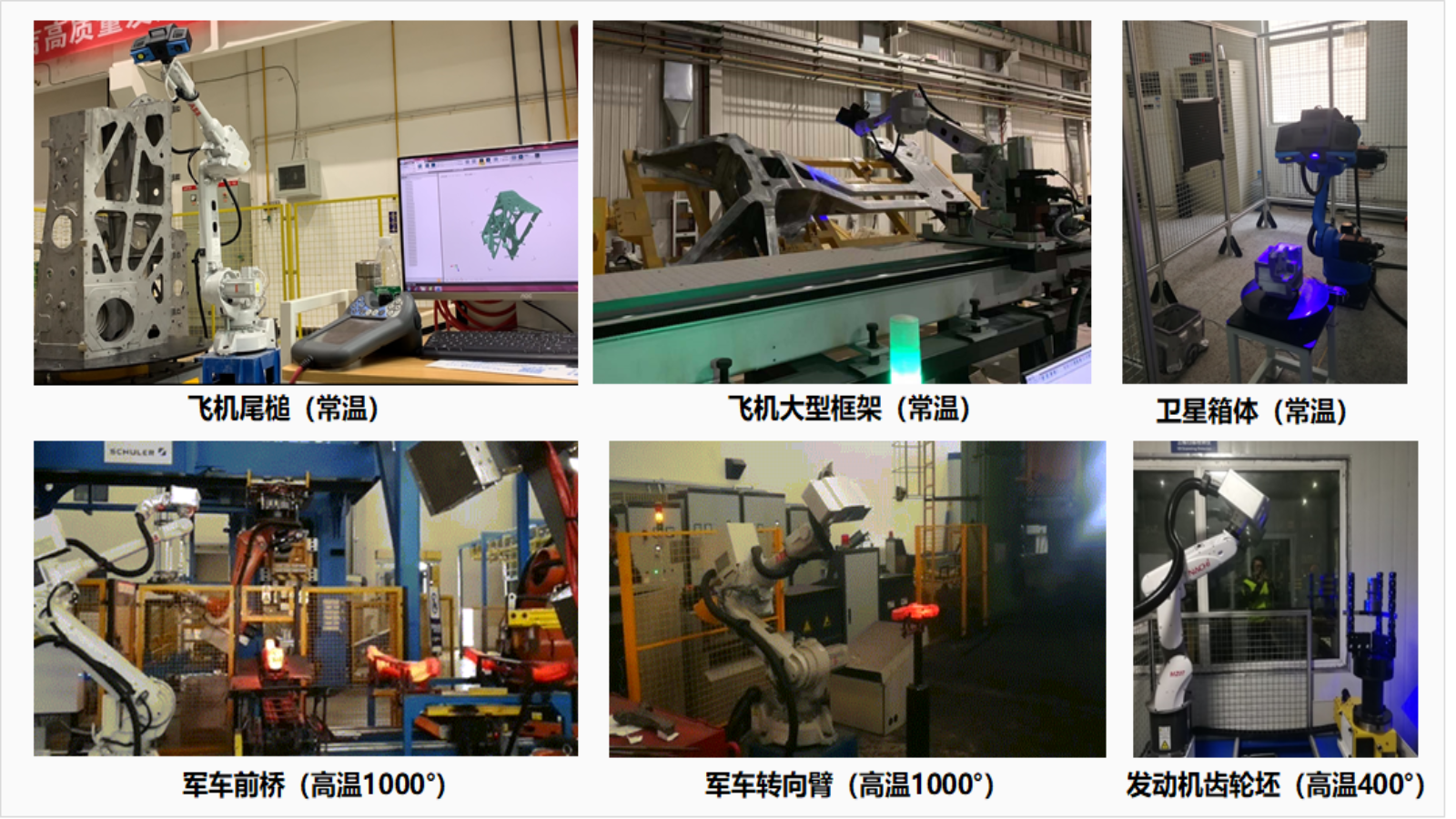
项目团队将面结构光测量和工业机器人相结合,攻克了高精度三维测量、测量路径自动规划、数据自动处理等关键技术,研制了系列自动化在线三维测量装备,国际首次在线实现了1100℃热模锻件三维尺寸的全测全检。广泛应用于国内规模最大的前桥、转向节、曲轴、齿轮等汽车关键锻件生产企业,提升了企业的技术水平和国际竞争力;还应用于黎明、安大、景航等航空企业,提升了叶片、导热内环等航空锻件的精度,支撑了重要国防装备的自主研制。
本项目提供了一种宽基载重子午线轮胎成型机带束鼓及设计方法,将带束鼓的中间段设计为凸出的曲面结构,带束鼓表面的轮廓线由两段直线段与位于两直线段间的弧形段组成,通过轮胎成型仿真模拟,以帘线伸张率和胎面胶料流动均匀性作为判断标准,优选确定最佳参数。本发明有效控制带束层的帘线伸张率,彻底解决定型时带束层帘线受力不均匀的问题,消除了机内定型过程中宽基轮胎胎肩胶料向胎冠中心流动的异常现象,提高了轮胎综合性能。

一种新型的汽车后视镜便携式全自动全功能检测设备,应用于后视镜加工厂的性能检测。能实现全品牌全功能的自动检测。目前市面上都是简易的较少功能可满足的手动检测盒。能避免检测过程人为因素造成的误检。
提出一种智能电动汽车转向和制动自适应动态协调控制系统及方法,可有效克服车辆转向、制动动力学的非线性耦合和参数不确定性等特性,消除了对控制模型的依赖,增强了控制系统对参数不确定性的鲁棒性,提高了智能汽车紧急主动避障的整体性能,保证了智能电动汽车紧急主动避障的实时性和稳定性。此外,提出了考虑执行器故障和侧倾运动的智能电动汽车转向控制方法,有效提升了智能电动汽车转向控制整体性能。

48V电动汽车纯电驱动系统包含:驱动电机、电机控制器、电池模块、储能换电柜。该系统拥有国内一流的驱动性能,采用矢量控制算法,具有国际先进水平。采用该系统可实现车电分离、人工自主手动换电和电池梯次利用。该系统使用成本低、安全可靠、维修方便、续航无忧。该系统拥有各项核心技术、自主知识产权,18项授权发明专利。已形成五个电机型号和三个控制器型号,风冷、油冷和水冷等一体化驱动系统,已通过国家强检。

(1)发明的磁流变电控减振器/悬置大幅度提升了磁流变液的有效使用率,降低了应用成本;经实验测试标定,执行器响应时间<15ms。 (2)开发的电控减振器在匹配自主开发控制器后,提升了采用被动悬架的某量产车型平顺性20%~40%、操稳性10%~15%。 (3)电控减振器及其系统动态特性测试系统(包括响应时间自标定系统、动态可控力特性评价系统)、非线性控制系统均已完备。

PPMLAB软件的主要设计思想在于将复杂的、繁琐的悬置系统设计分析工作按照常规设计分析流程逐一展开,并在所有关键点、疑点、难点处实时提供说明和帮助,以便工程师快速掌握悬置系统设计分析方法以及软件操作方法,迅速提升公司在悬置系统设计分析开发方面的能力,具备与主机厂、零部件供应商同步正向设计开发、提供系统解决方案的整体能力。
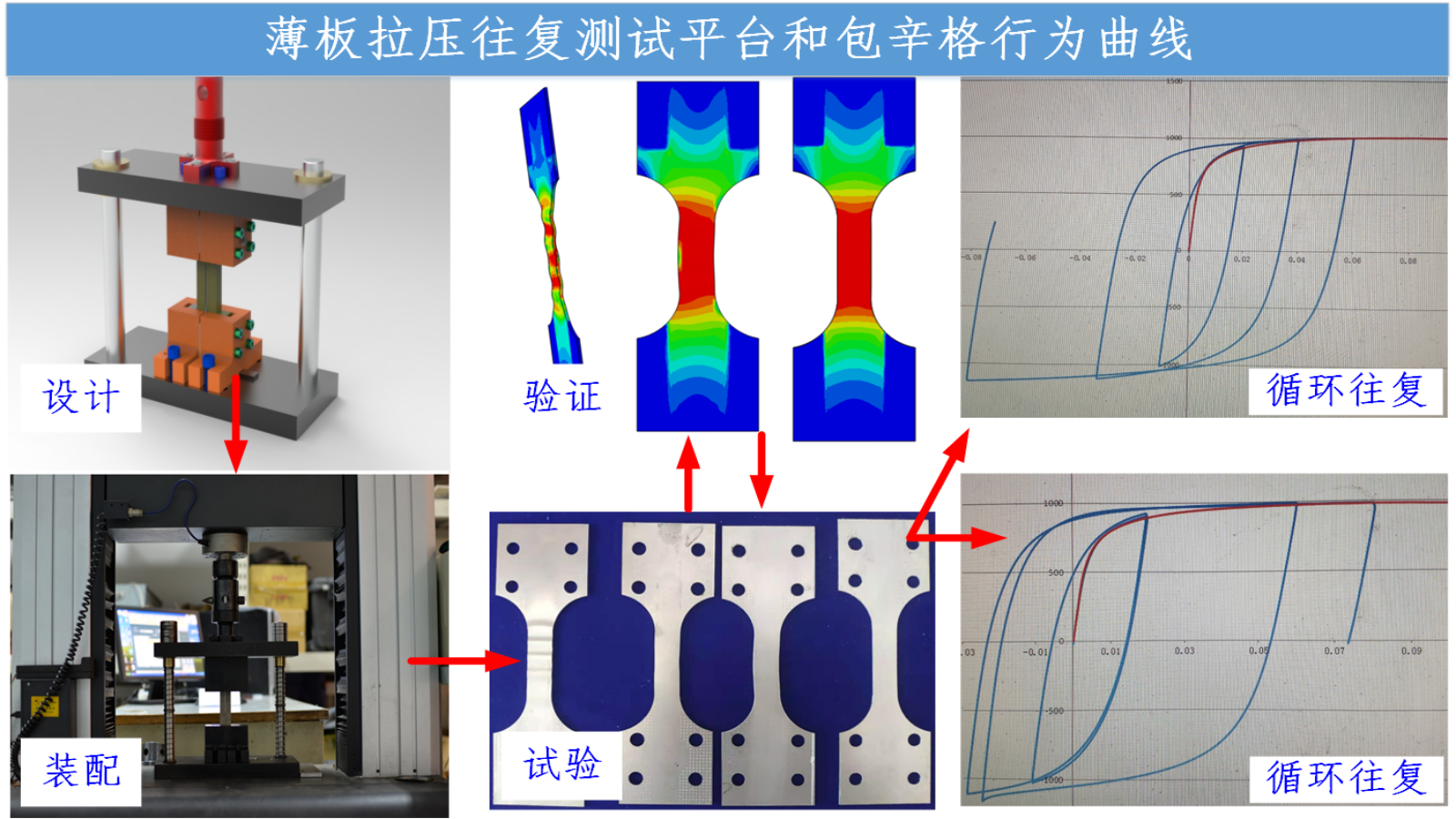
回弹是汽车车身成型领域三大主要缺陷之一。但随着汽车钢强度级别的提高,尤其是强度级别超过800MPa的薄钢板冲压成形后,其回弹现象特别严重。而零件回弹尺寸的大小,直接影响到零件的表面质量以及车间后续的总装装配,对于比较大的回弹零件,就需要额外反复进行校正或者精修模具来补偿回弹,增加了大量不必要的时间以及模具开发成本。 团队自主开发了能够测试包辛格行为的薄板拉压往复夹具,消除了侧面摩擦力,并建立了超高强钢新型本构模型,具备完成回弹精确预测和控制策略的能力。









