
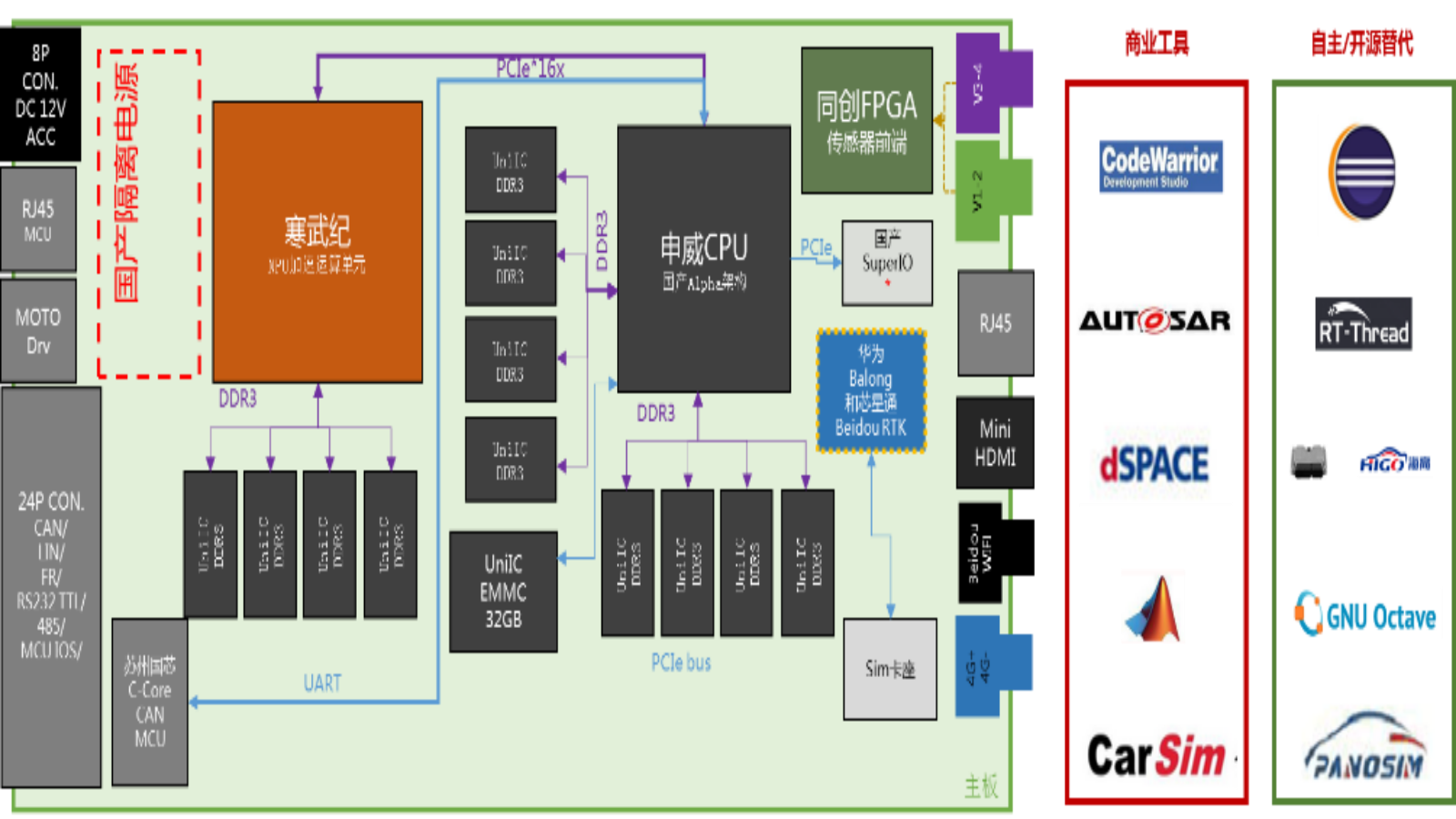
瞄准中国自主可控智能网联汽车计算单元的国家战略需求,开展中国设计中国制造的智能网联汽车专用高性能控制器研发。 • 智能汽车中央域控计算平台:实现视觉、雷达、高精定位等多传感器信息融合、可行驶区域动态建模及预期行驶轨迹多目标决策。 • 智能汽车底盘运动控制平台:实现汽车运动控制和底盘线控化。

48V电动汽车纯电驱动系统包含:驱动电机、电机控制器、电池模块、储能换电柜。该系统拥有国内一流的驱动性能,采用矢量控制算法,具有国际先进水平。采用该系统可实现车电分离、人工自主手动换电和电池梯次利用。该系统使用成本低、安全可靠、维修方便、续航无忧。该系统拥有各项核心技术、自主知识产权,18项授权发明专利。已形成五个电机型号和三个控制器型号,风冷、油冷和水冷等一体化驱动系统,已通过国家强检。
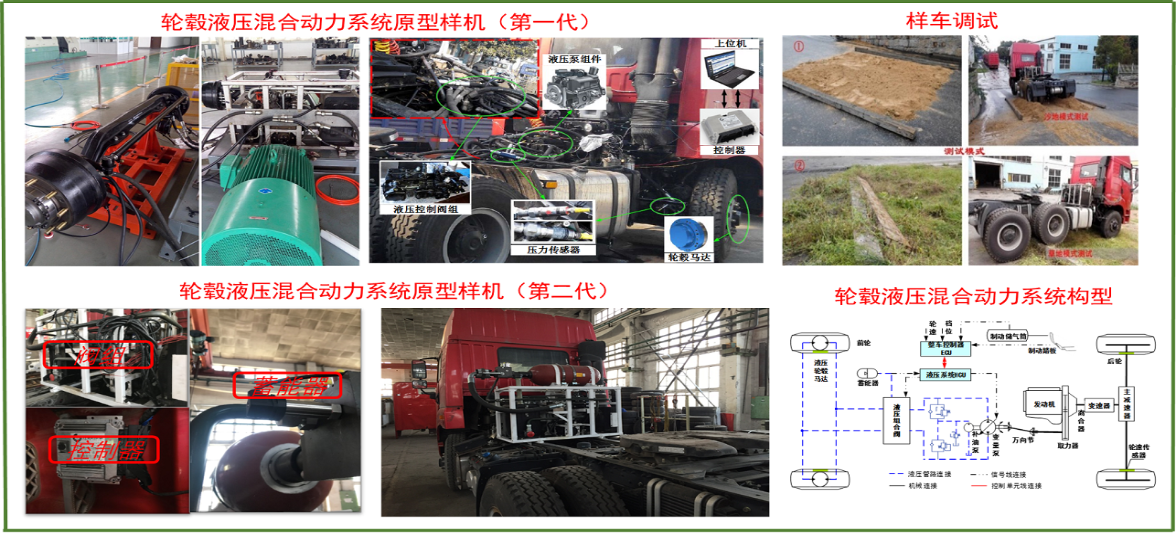
针对当前重型商用车的驱动形式单一,柔性化功能差,无法兼顾恶劣路面低速通过性和良好公路高速行驶稳定性的问题。在国内率先提出了一种系列化多功能的轮毂液压混合动力系统构型方案,相应开发出闭式液压回路和开式液压回路集成的多模式能量管理算法;提出的稳态前馈+模型预测动态反馈复合控制方法,有效解决了液压轮毂和后轮机械驱动耦合的难题。经过数年的技术攻关,成功将此技术应用于解放JH6和天V车型,提高了传统重型商用车的整车动力性和经济性,突破了欧美发达国家的长期技术垄断。由该技术研发的重型商用车轮毂液压前桥总成已出口法国,
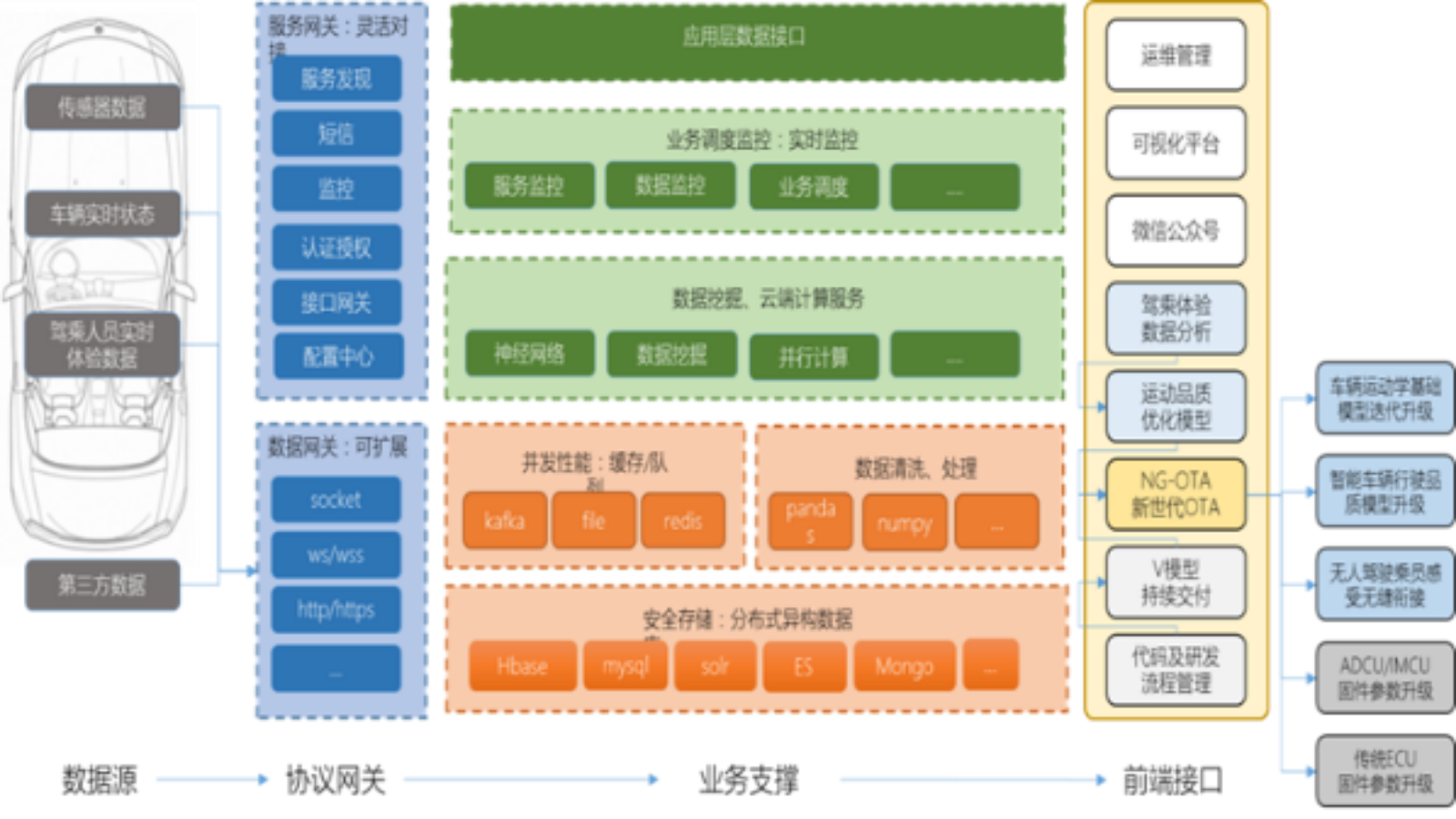
瞄准中国制造2025提出的掌握智能网联汽车核心技术的行业重大技术需求,依托吉大汽车“人-车-路闭环系统运动学与动力学智能控制”优势,开展智能汽车多传感器融合感知-可行驶区域认知-预期轨迹决策-运动学与动力学控制-2纵1横1垂线控技术研发。 • 不同级别智能驾驶的“算法-软件-硬件-平台一体化解决方案”。 • “车辆动力学+运动学+线控执行+驾驶行为+驾驶员生理体验”的五位一体行驶品质优化。 • 智能网联汽车数据监控调度平台与OTA升级服务。

道路交通环境复杂度及自动驾驶环境适应性平台用于无人车测试评价,可实时显示道路交通环境复杂度及环境适应性情况。本系统基于跨平台的.NET Core技术以及RESTful Web API 应用实现解耦,实现数据驱动、复杂度算法驱动和测试驱动等多角度开发模式,具有高内聚和低耦合性。系统根据无人车所行驶道路交通环境实时显示复杂度及环境适应性值,结果值为0~100,为自动驾驶道路交通环境复杂度及环境适应性提供定量评估依据。



