提出一种智能电动汽车转向和制动自适应动态协调控制系统及方法,可有效克服车辆转向、制动动力学的非线性耦合和参数不确定性等特性,消除了对控制模型的依赖,增强了控制系统对参数不确定性的鲁棒性,提高了智能汽车紧急主动避障的整体性能,保证了智能电动汽车紧急主动避障的实时性和稳定性。此外,提出了考虑执行器故障和侧倾运动的智能电动汽车转向控制方法,有效提升了智能电动汽车转向控制整体性能。
项目达成了多项轮毂高性能车用轮毂电机系统关键技术研究成果: 1. 轮毂驱动电机总体优化与集成技术; 2. 轮毂驱动电机与车轮一体化设计技术; 3. 轮毂驱动电机控制技术; 4. 轮毂驱动电机散热、密封与安全技术; 5. 轮毂驱动电机轻量化设计技术; 6. 轮毂驱动电机原理样机技术; 7. 轮毂驱动电机试验与评价。
该项目的研究成果,对于突破退役电池梯次阶段多机制在线诊断技术瓶颈,丰富电池容量损失机理与损失轨迹预测方法的研究内涵,探索新老电池并联系统协作运行的多目标优化策略,提供了创新性、探索性的科学路径;对于强化退役电池全生命周期高质量管理体系,促进循环利用产业资源化、高值化、绿色化发展,具有重要的学术意义与社会价值。
本技术将免充气轮胎技术引入车辆隔振系统设计,提出了一种免充气轮胎-混合电磁悬架新型隔振系统。一方面彻底解决了军用车辆行驶安全的运动学问题,免充气轮胎通过特殊的结构设计和材料应用实现了轮胎承载、减振等性能要求,相较于充气安全轮胎,从根源上避免了不同使用环境下的爆胎危险,实现了车辆行驶安全性的跨越式提升;另一方面以更高效、更节能的方式改善了免充气轮胎车辆的动力学性能。
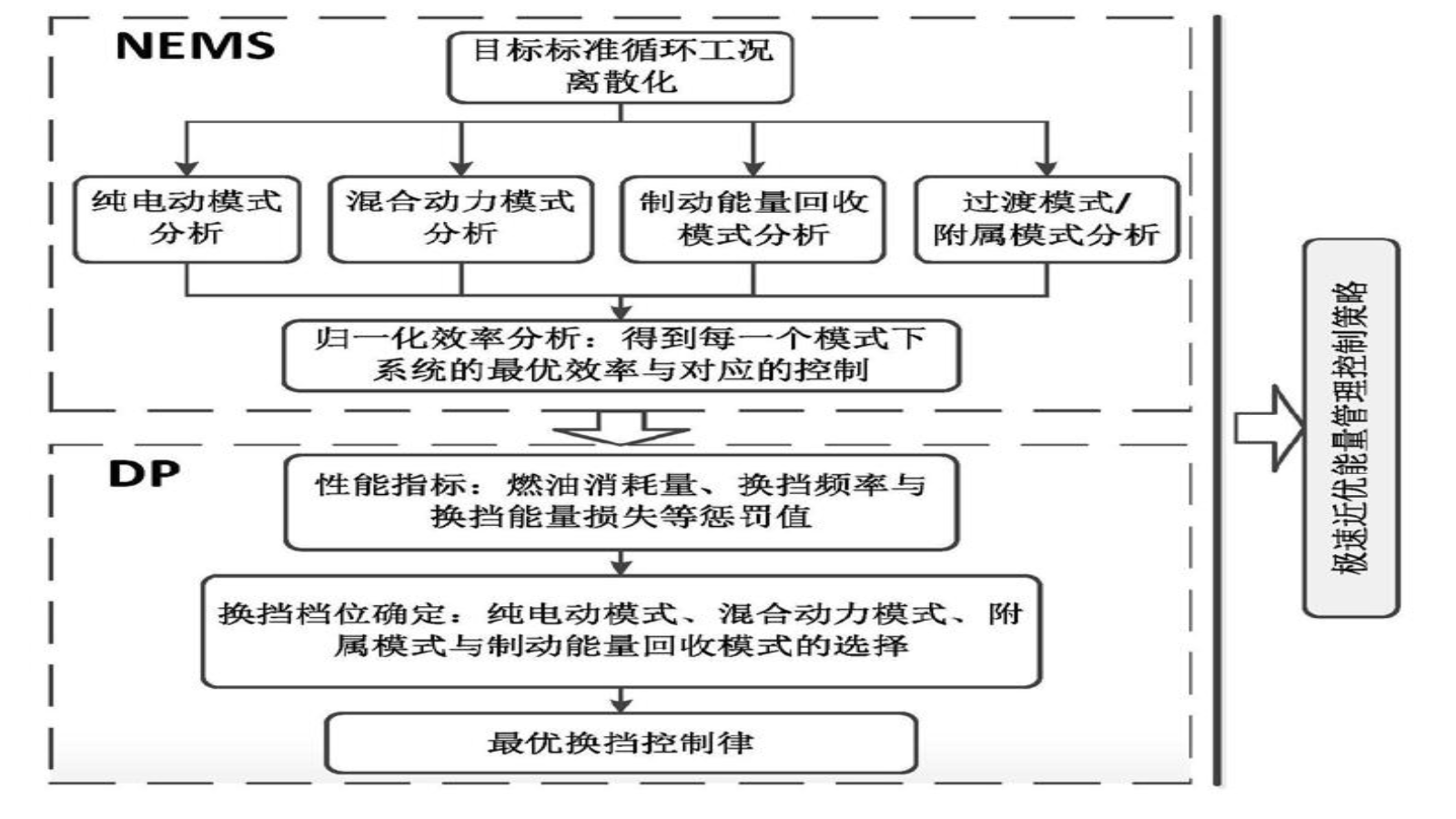
一种基于能量效率最大化的多模混合动力汽车能量管理控制策略,共分两层,内层是效率归一化最大化策略,用于计算最优的能量分配律,能够同时处理混合动力模式与纯电动模式的能量效率优化问题;外层是动态规划,用于处理多模混合动力汽车的模式切换问题,求解最优模式切换命令,能够在避免频繁换挡与换挡能量损失前提下,做出最优模式切换控制命令。外层与内层相互协调,最终形成适用于多模混合动力汽车的近优能量管理控制策略。

本发明提出一种考虑道路坡度的电动汽车速度瞬时优化的方法,通过将车辆动能转化为等效能量消耗,使总能量消耗瞬间最小化,从而优化牵引力或制动力矩。此外,还设计了一种速度相关因子来调节给定巡航速度范围内的车速,克服了传统速度优化方法要提前获取未来道路信息的弊端,同时该方法具有极短的运算时间,因此具有极强的实车应用前景。

本发明提出了一种基于道路坡度的能量归一最小化的混合动力汽车优化方法,包括以下步骤:初始道路信息获取;初始参数设定;燃油等效因子计算;燃油等效消耗率计算;速度转化因子计算;能量归一最小化计算。本发明在满足车辆动力性和考虑道路实际状况的前提条件下,采用一种基于道路坡度的能量归一最小化的混合动力汽车优化方法,保证了能量消耗的最优化,同时保证了蓄电池的电量平衡,进而确保了蓄电池的性能和寿命。
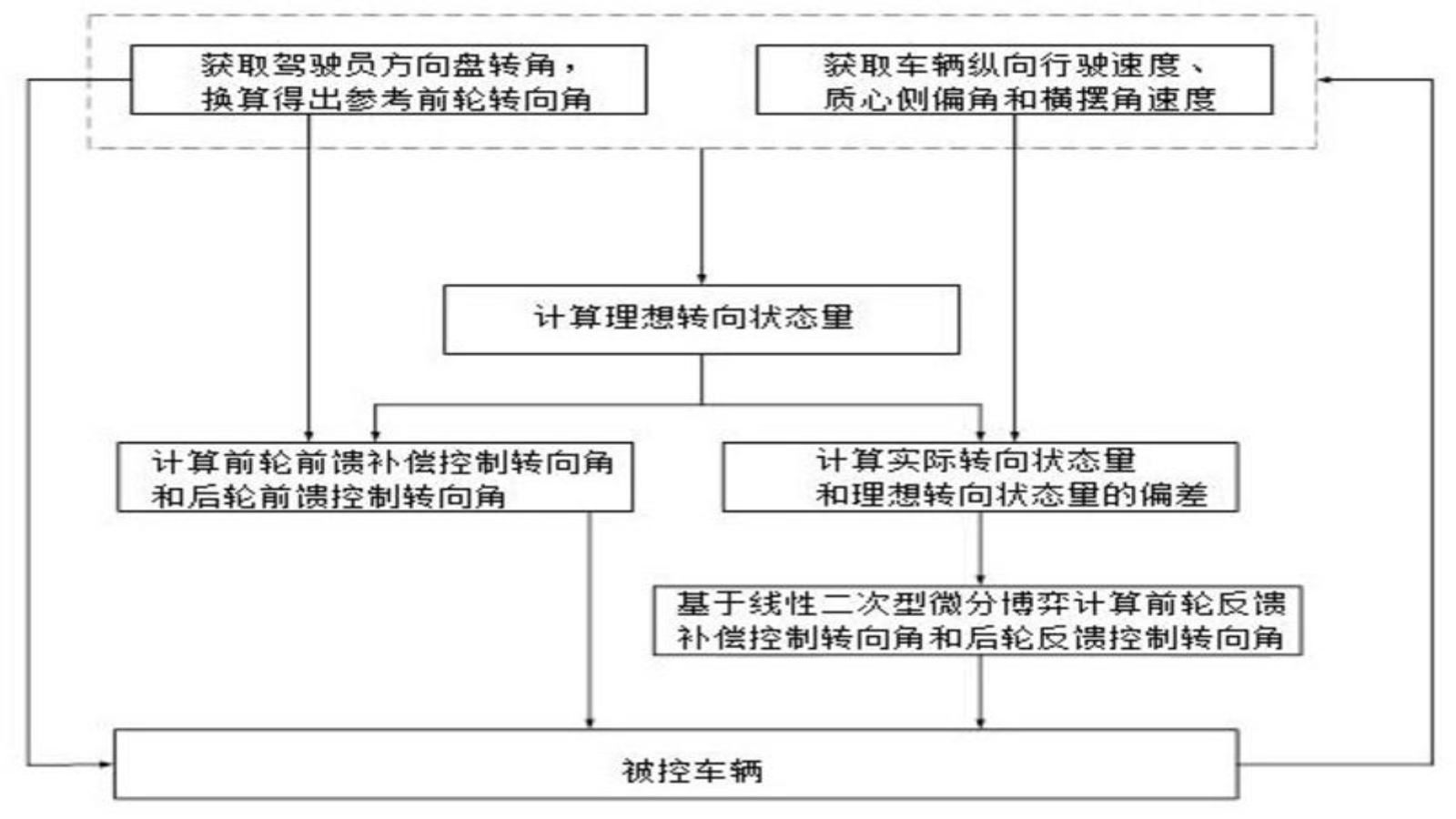
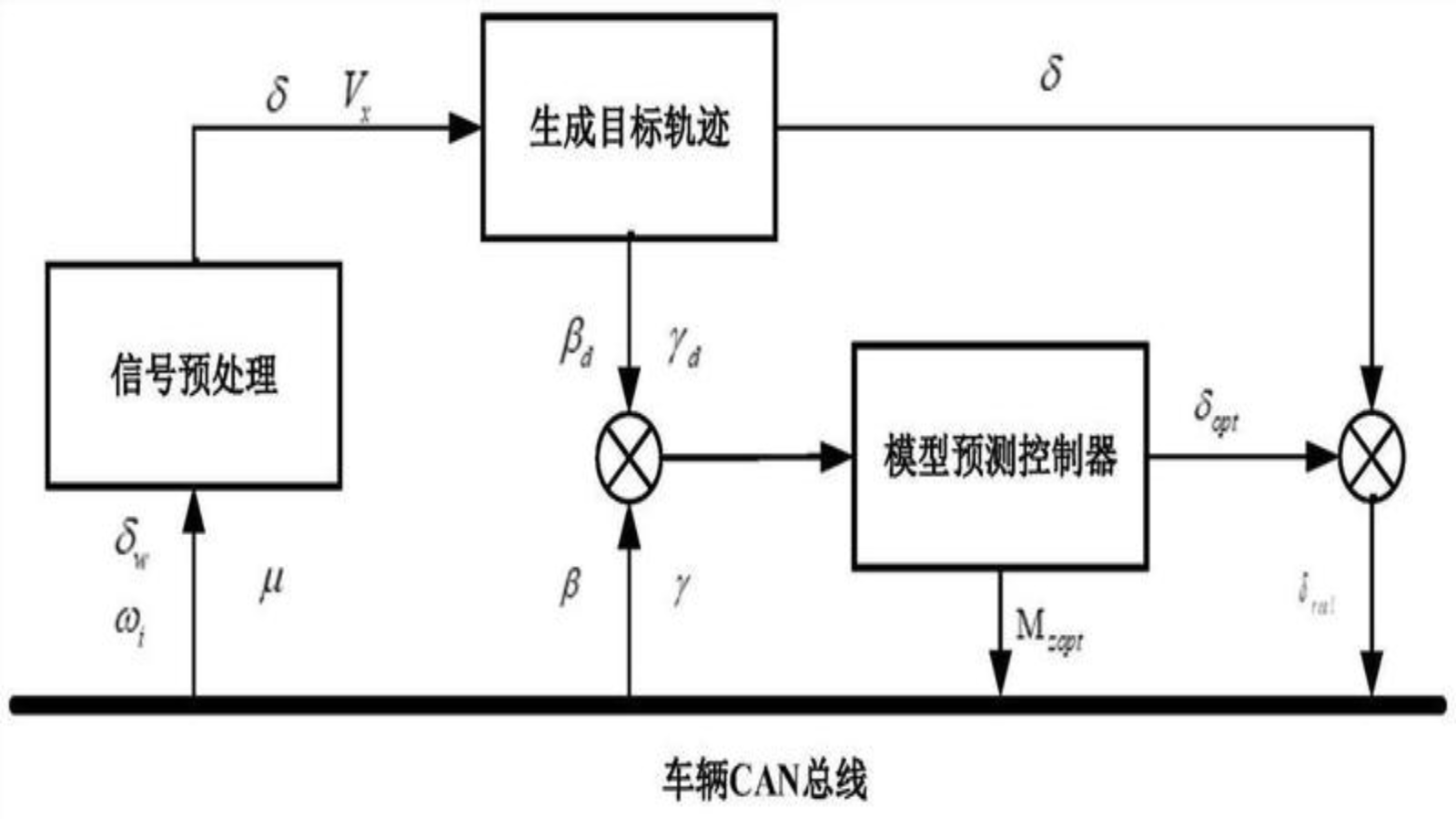
提供了一种基于线性二次型微分博弈的四轮独立驱动电动汽车四轮主动转向控制方法,通过前馈与反馈控制相结合的四轮主动转向提高电动汽车高速转向时的操纵稳定性和低速转向时的操纵灵活性,有效地降低了汽车质心侧偏角,能够较好地跟踪车辆理想横摆角速度,改善了车辆的主动安全性能。
提供了一种一种极限工况下的四轮独立驱动电动汽车牵引力控制方法,采用三种不同的驱动模式取代了单一的转矩分配方式,方便了驾驶员在极限工况对车辆的操纵,提高了车辆的主动安全性。
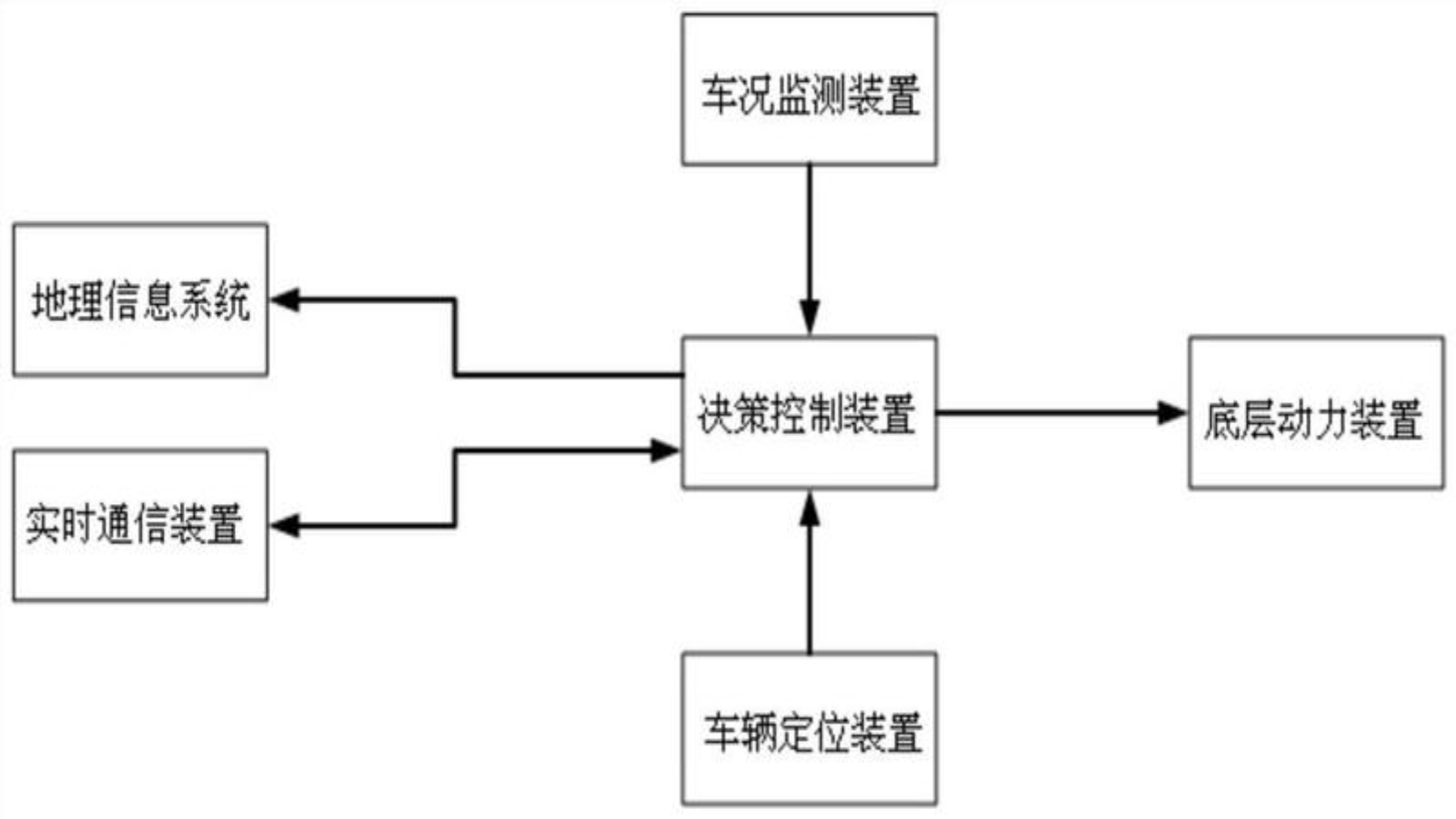
提供了一种基于动态规划算法的电动汽车能量管理和行驶方法,包括轮毂电机测功、求出道路坡度信息、获取自身状态以及前车的状态和最优的分配力矩和行驶方法,为其他用于能量管理的控制算法的控制效果提供对比的基准,具有广阔的应用前景。