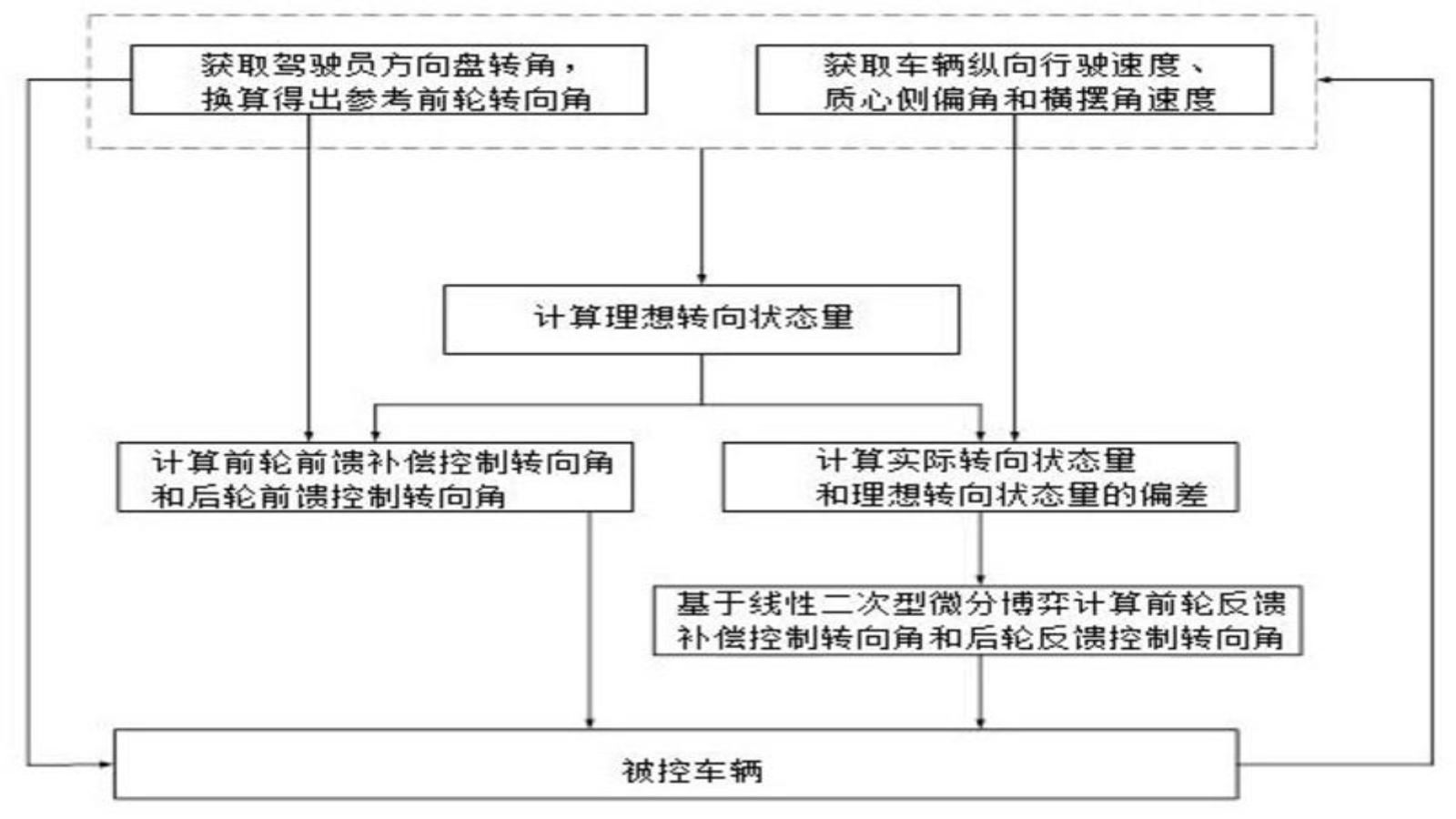
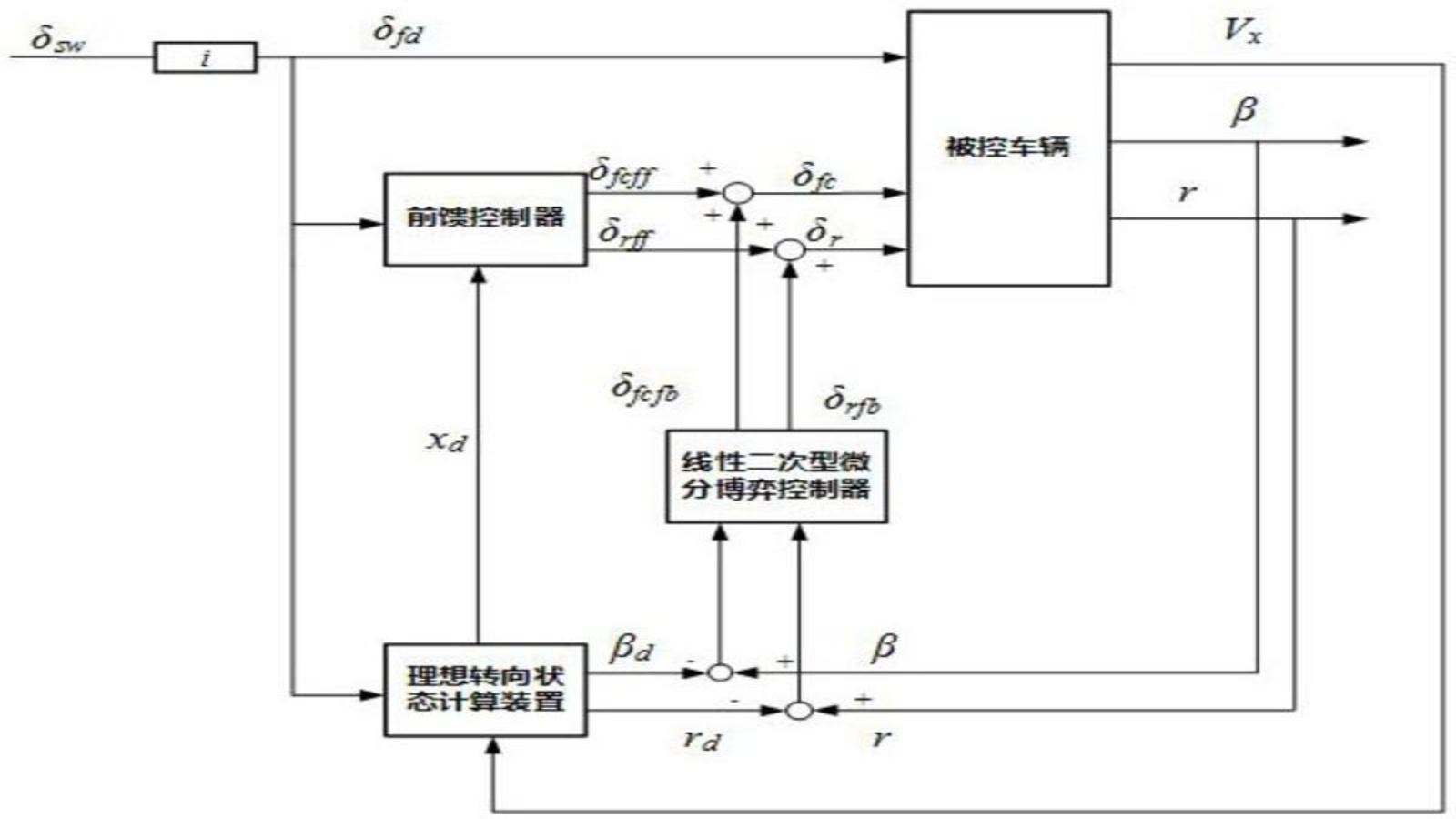
提供了一种基于线性二次型微分博弈的四轮独立驱动电动汽车四轮主动转向控制方法,通过前馈与反馈控制相结合的四轮主动转向提高电动汽车高速转向时的操纵稳定性和低速转向时的操纵灵活性,有效地降低了汽车质心侧偏角,能够较好地跟踪车辆理想横摆角速度,改善了车辆的主动安全性能。
本成果涉及一种基于线性二次型微分博弈的四轮独立驱动电动汽车四轮主动转向控制方法,通过前馈控制器输出前轮前馈补偿控制转向角和后轮前馈控制转向角,基于线性二次型微分博弈算法,将前轮反馈补偿控制转向角和后轮反馈控制转向角作为博弈的两个“局中人”,通过求解耦合代数黎卡提方程组获得微分博弈的反馈纳什均衡解,从而求得前轮反馈补偿控制转向角和后轮反馈控制转向角;通过前馈与反馈控制相结合的四轮主动转向提高电动汽车高速转向时的操纵稳定性和低速转向时的操纵灵活性,在基本不改变驾驶员传统前轮转向驾驶感觉的前提下,有效地降低了汽车质心侧偏角,能够较好地跟踪车辆理想横摆角速度,改善了车辆的主动安全性能。