提供了一种一种松软路面智能农机自动驾驶方法,本发明着重考虑轮胎-土壤建模,以获取准确完整的智能农机动力学特性,提高智能农机特殊作业环境下的精确性。
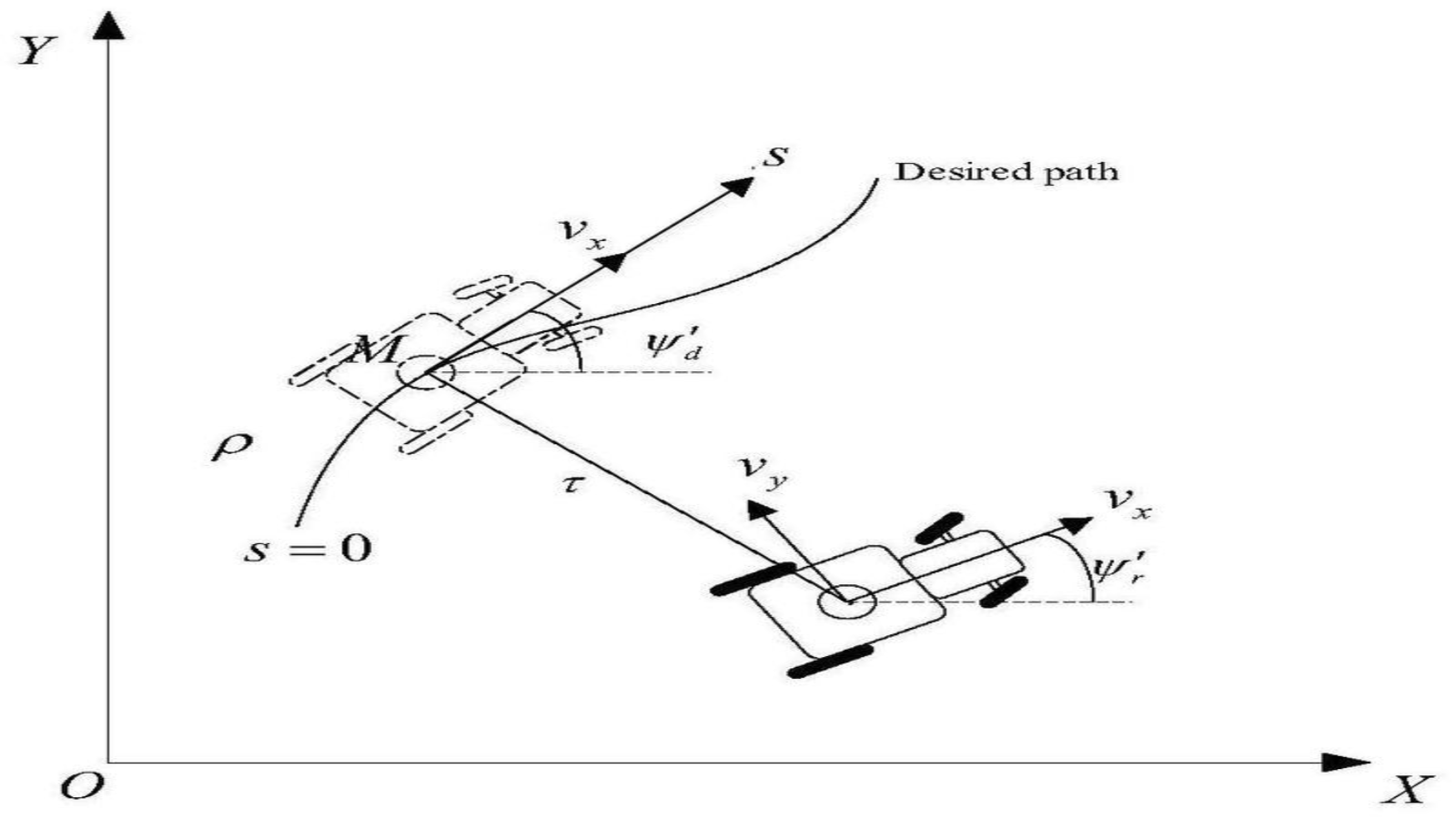
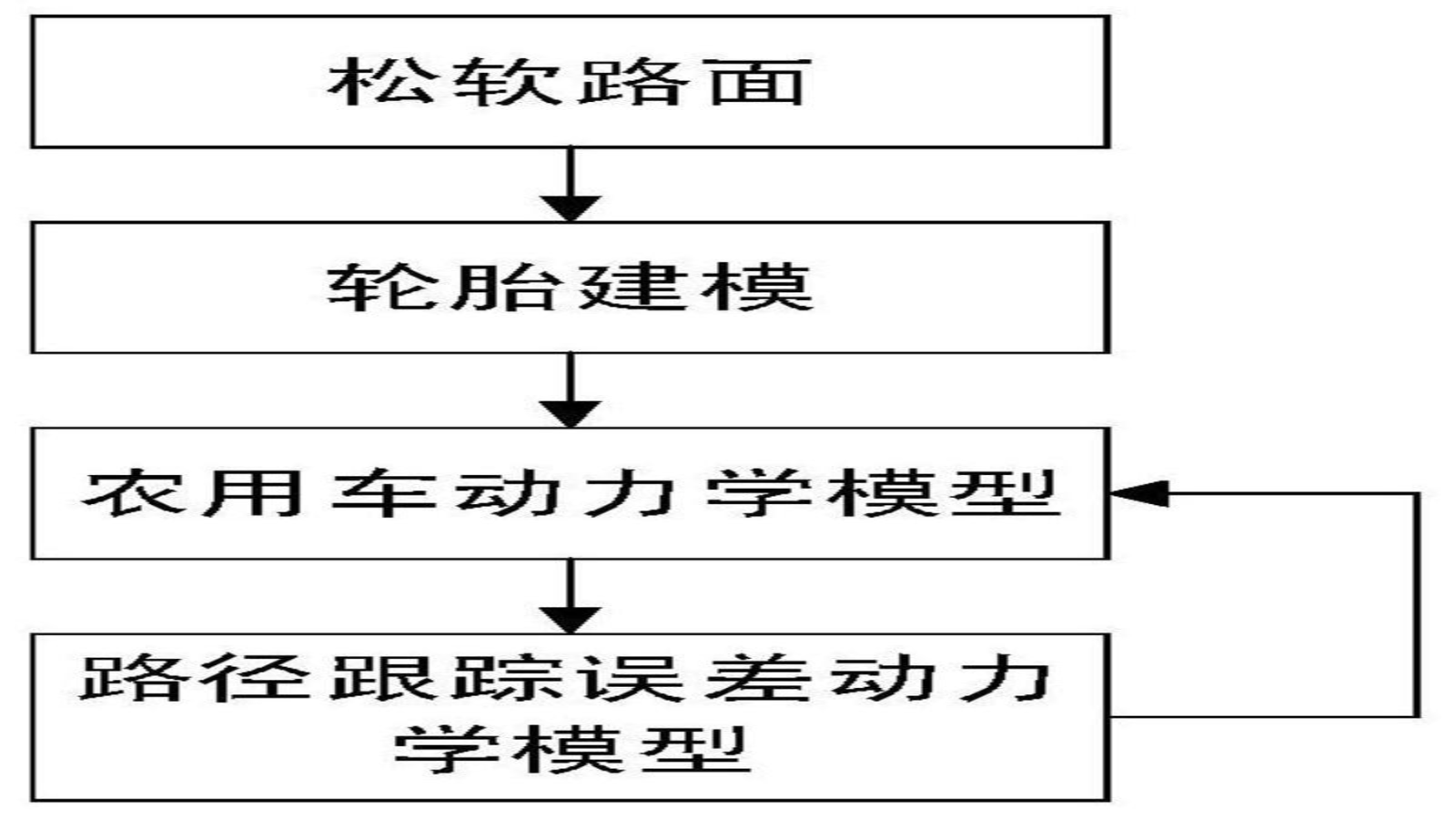
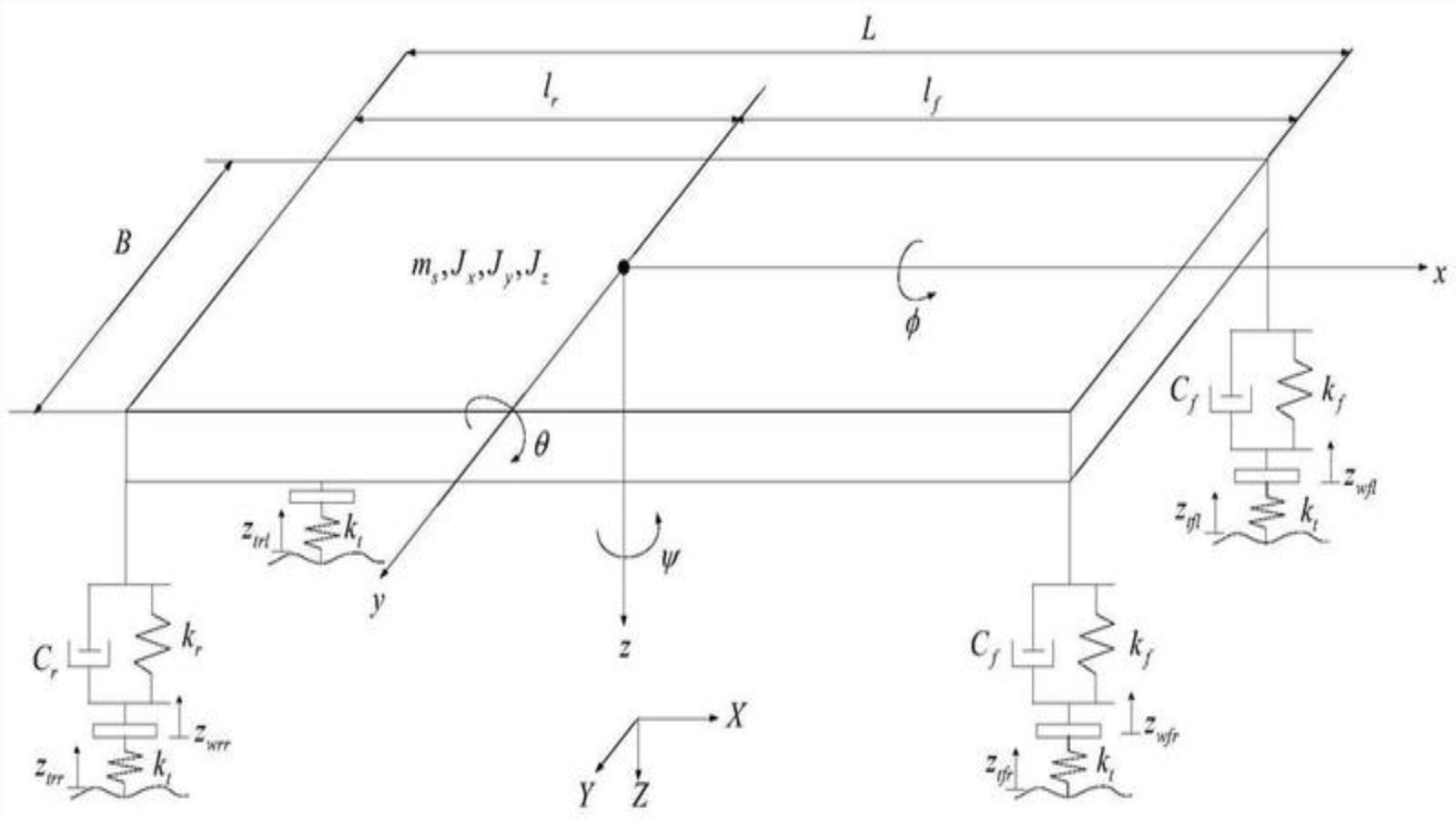
本发明涉及一种松软路面智能农机自动驾驶方法,包括以下步骤:根据松软路面与轮胎之间相互作用的特性,建立土壤-轮胎模型;在建立的土壤-轮胎模型的基础上,建立表征智能农机纵\横\垂耦合行为特征的动力学模型,获取准确完整的智能农机动力学特性;在获取的智能农机动力学特性基础上,建立自动驾驶误差动力学模型,利用Matlab-Simulink软件进行仿真验;本发明着重考虑轮胎-土壤建模,以获取准确完整的智能农机动力学特性,提高智能农机特殊作业环境下的精确性。