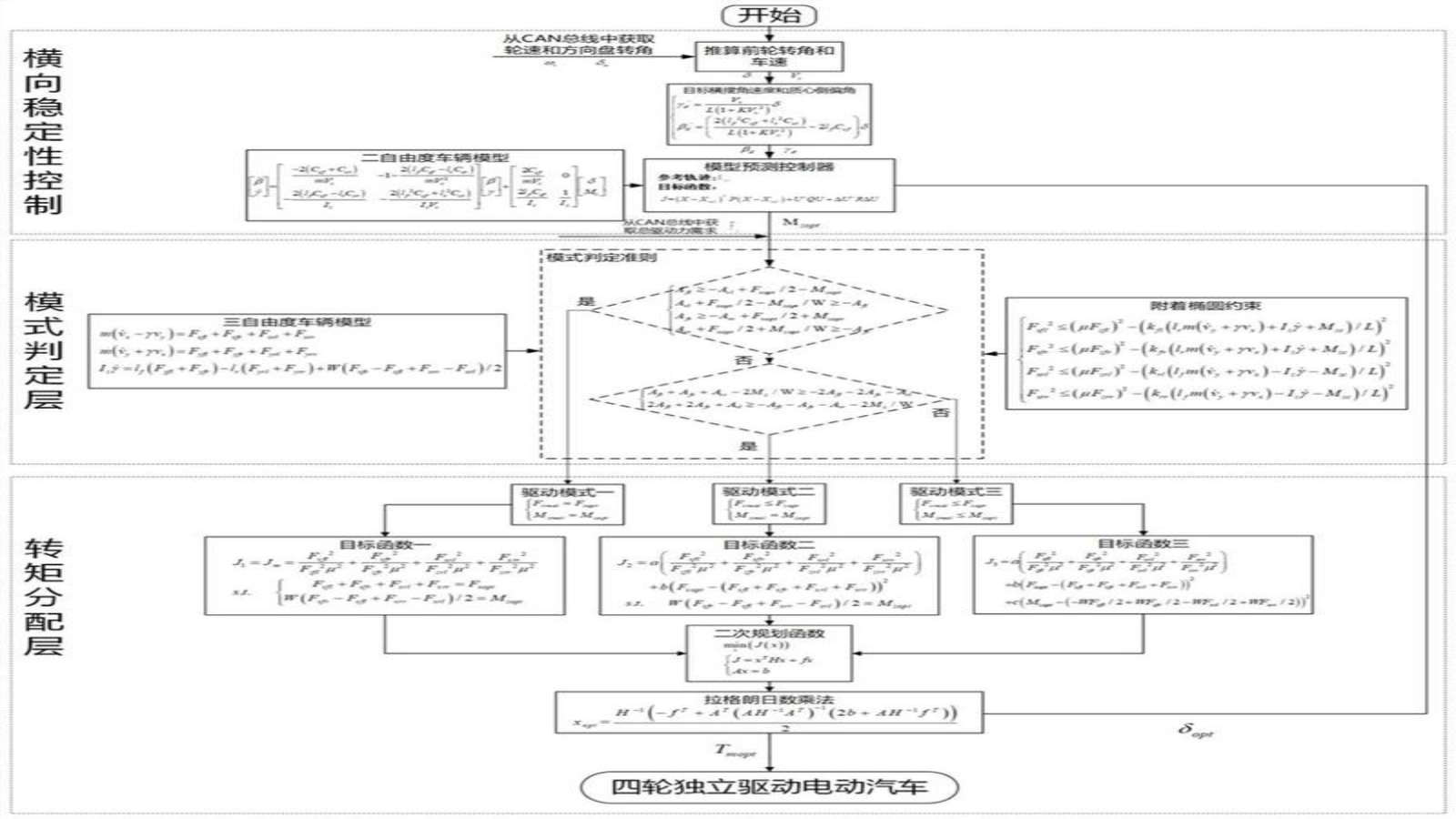
提供了一种一种极限工况下的四轮独立驱动电动汽车牵引力控制方法,采用三种不同的驱动模式取代了单一的转矩分配方式,方便了驾驶员在极限工况对车辆的操纵,提高了车辆的主动安全性。
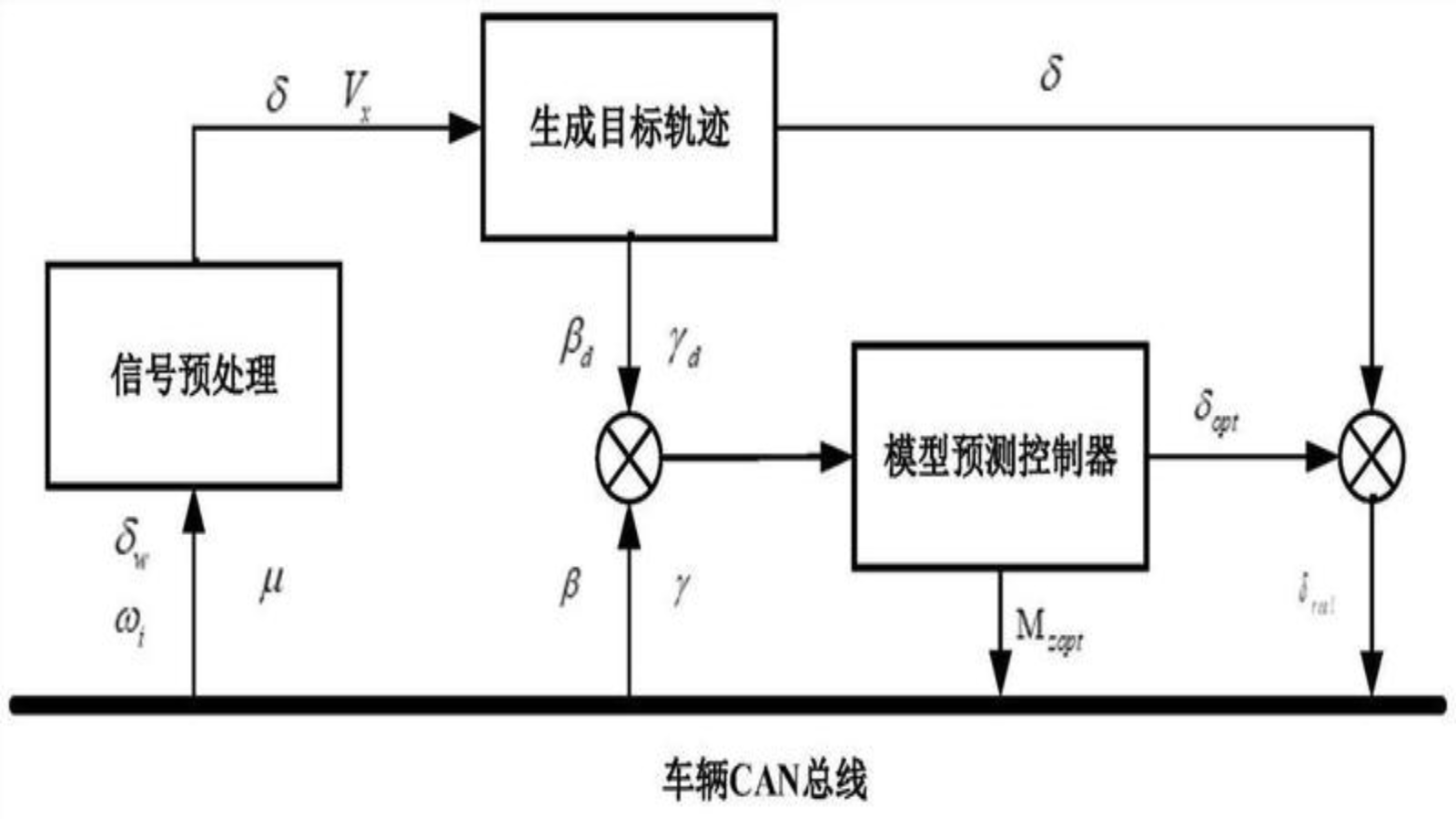
本发明公开一种极限工况下的四轮独立驱动电动汽车牵引力控制方法,综合考虑了驾驶员的控制需求以及车辆的稳定性原则,采用三种不同的驱动模式取代了单一的转矩分配方式,最大程度地利用了轮胎的纵、侧向附着裕度,保证了四轮独立驱动电动汽车在低附着路面的运动跟踪精度和车身稳定要求,同时也使得上层控制目标和底层执行结果保持一致,方便了驾驶员在极限工况对车辆的操纵,提高了车辆的主动安全性。