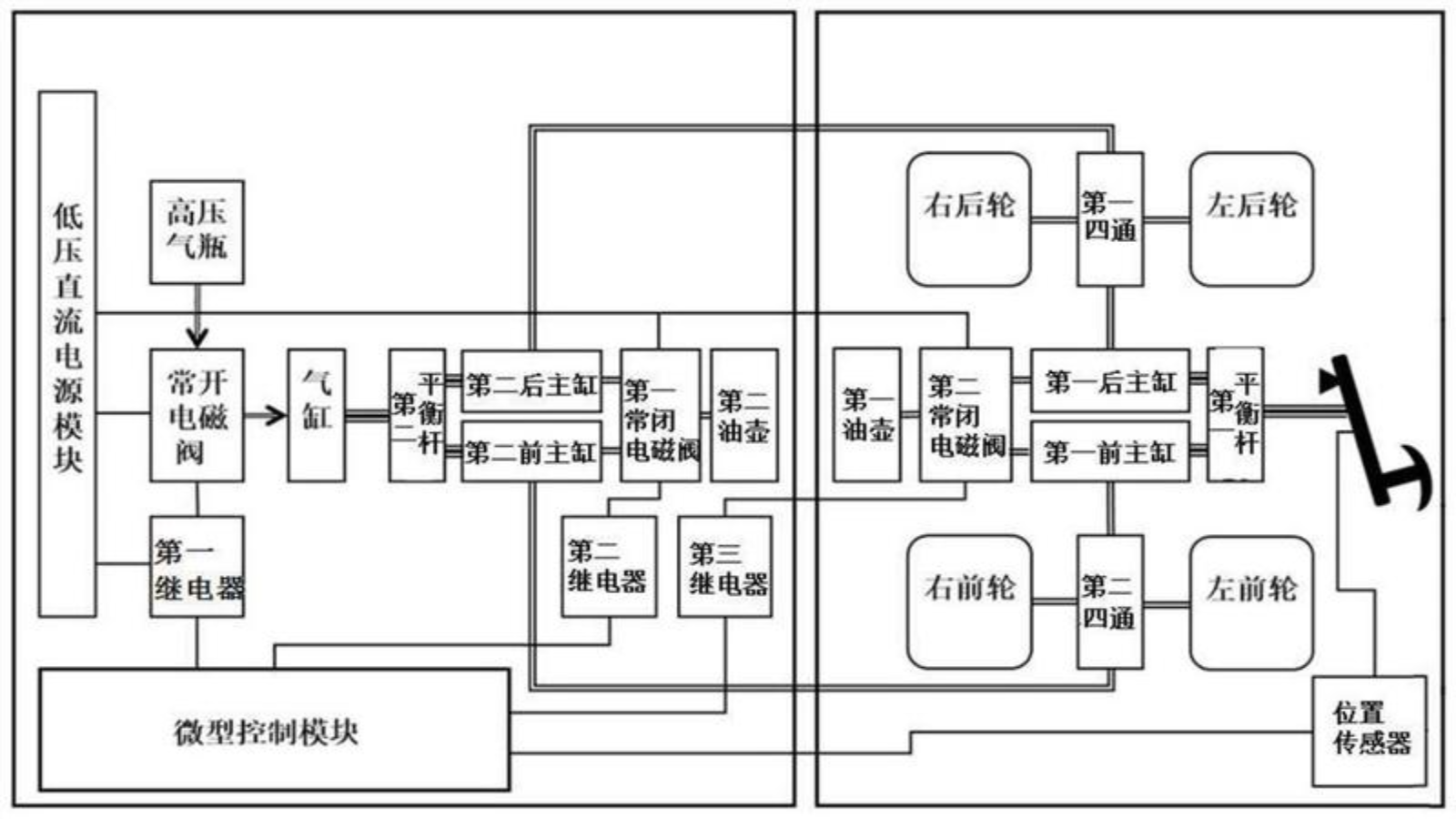
提供了一种基于人机共驾的自动驾驶车辆通用制动系统及制动方法,采用模块化设计,只需将气液耦合线控制动模块和原车制动模块并联,且通用性好,适用于所有自动驾驶车辆的制动系统,结构简单,安装方便。
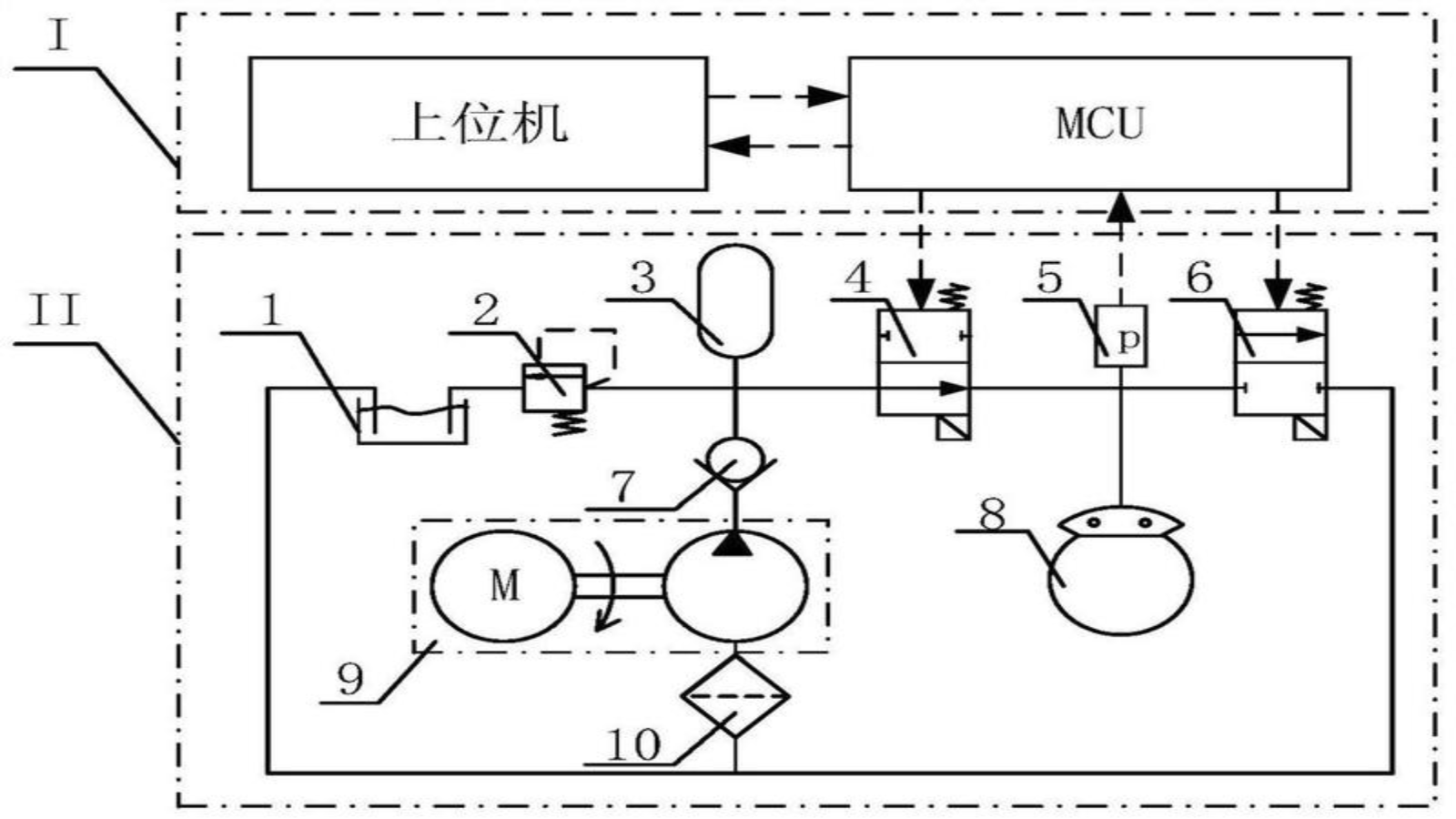
本发明涉及一种基于人机共驾的自动驾驶车辆通用制动系统及制动方法,包括控制系统模块,其用于控制系统气路和液压油路的通断,从而实现人工驾驶、自动驾驶制动、自动驾驶空闲的系统工作状态;机械液压制动模块,其使车辆处于有人驾驶状态下,驾驶员进行常规制动操作;气液耦合线控制动模块,其与机械液压制动模块并联设置,用于快速响应线控制动信号;车辆底层制动执行模块,其在液压油路压力的驱动下,控制车辆实现制动;本发明采用模块化设计,只需将气液耦合线控制动模块和原车制动模块并联,且通用性好,适用于所有自动驾驶车辆的制动系统,结构简单,安装方便。