在无 GNSS 覆盖场景,车辆定位丢失后的重定位(又称为 Kidnapped Robot)是一 个学术界的开放性的问题。在自动驾驶的低速泊车场景中,目前的定位方案依赖 SLAM 先 验地图,一旦车辆丢失,(比如车辆下电后,芯片未启动前车辆被移动),车辆就再也无 法恢复定位了。

【研究目标】 1. 如何利用车身的传感器(如相机和激光雷达)和自建地图,基于地图实现可靠的重 定位,是低速泊车场景急切需要解决、但是尚未有清晰解决方案的问题。 2. 如何利用多模态的传感器观测(如相机和激光雷达), 学习到与场景相关的描述 子,云端众包建图可以利用这些学习到的描述子做回环检测,修正建图误差。
【项目产出】 1. 交付算法原型,白盒交付训练、推理、后处理代码。 2. 基于蔚来 NT2 平台数据,验证算法,和主流方法做 benchmarking,性能指标做 4 到 the state-of-the-art。 3. 集成算法原型到建图定位系统,做到 POC 系统展示。
【交付指标】 研发基于可学习的全局和局部描述子,可以做到在无先验的情况下重定位,位置误 差做到米级别, 航向角误差在两度以内; 基于可学习的描述子,对建图时的回环检测实现 top1 recall 98%以上的性能指标; 用于定位的描述子需要最大限度复用车端的感知能力,控制算力负载,做到有潜力 车端部署; 与蔚来共同完成在百级别停车场和服务区的训练和评测。
【研究背景/问题】 自动驾驶对现有的车载有线网络提出全新挑战。如下图所示,自动驾驶系统是由传感 器、车机算力、执行器三个部分构成的。传感器采集摄像头、点云、路况等信息,车机算 力融合传感器数据并推理形成驾驶决策,执行器通过控制方向盘、刹车、油门等完成自动 驾驶操作。在这个系统中,有线网络承担了从传感器到车机算力、从车机算力到执行器两 个环节的数据传输任务。自动驾驶应用对这两段有线网络提出了严苛且完全不同的要求。 从传感器到车机算力的有线网络主要承载摄像头、激光雷达等传感器的数据,需要满足大 带宽、低延时、时间同步、少线束四个要求。从车机算力到执行器的有线网络主要承载控 制数据,需要满足高可靠、低延时、时间同步、密集的协议转换四个要求。
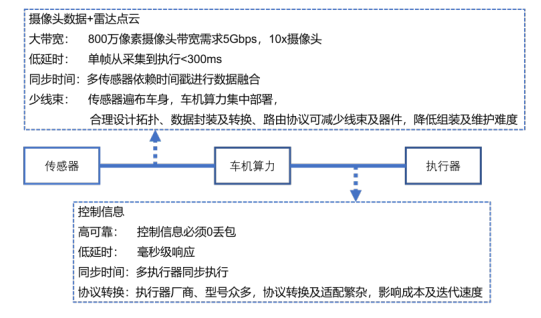
本研究课题将重点关注传感器至车机算力这部分有线网络。目前自动驾驶领域普遍采 用的传感器输出为并行信号,车载有线网络首先通过串行器将并行信号转化为串行信号, 之后通过跨越整个车身长度的线缆将串行信号输送至解串器恢复为并行信号,最后将该并 行信号接入车机算力。该互联方式最大的特征是传感器及车机算力点对点互联,伴随传感 6 器数量的增加,所需线束长度、连接器数量及串并转换元件的数量将成比例增加,对整车 带来电磁干扰、装配复杂、成本增加等诸多挑战。 为解决以上挑战,汽车电子电气架构正在向车载以太网方向演进,其核心思路是将距 离较近的传感器通过以太网交换机进行汇聚,再通过大带宽骨干网络传输至算力。该思路 可以极大的减少线束,避免电磁干扰,同时也会简化骨干网带宽升级。但非常遗憾,实施 以上思路面临诸多挑战。
【研究目标】 本课题将围绕以下四个问题展开研究,相应目标如下 1. 问题 1:关键车规级元件缺乏测试方法及测试标准。如摄像头并行信号与以太网信 号转换芯片的延时及丢包率,大带宽车载交换芯片的排队延时及传输延时。 目标 1:建立相关器件的测试方法及测试标准,并完成方法验证。 2. 问题 2:传感器信号经以太网交换机汇聚后无法直接接入车机算力芯片,这主要是 因为车机算力芯片以 MIPI 为主力 I/O 接口导致。解决思路是在以太网信号接入车 机算力前通过某种方式转换为 MIPI 信号,但硬件方案增加成本,软件方案消耗算 力。 目标 2:设计合理的软硬结合架构,加速大带宽下传感器信号高速接入车机算力。 3. 问题 3:以太网延时对自动驾驶造成的影响缺乏评估。如果采用以太网取代传感器 到算力之间的点到点互联,延时将会随路径长度一同增加,但该增加幅度以及对 上层自动驾驶应用造成的影响尚无科学的评估方法。 目标 3:设计测量方法,定量评估以太网延迟增加对自动驾驶的影响。 4. 问题 4:缺乏相关传输及路由协议设计。在目前的车载以太网实践中,并没有有效 的传输协议,为避免拥塞只能采取过度供给带宽的方法,抬高了成本。另一方 7 面,由于已有的路由协议收敛时间远远无法满足车载有线网络的要求,实践中往 往采用配置静态路径的方式,导致在故障时车载以太网的可用性降低。 目标 4:设计传输及路由协议,确保传感器及算力之间无损信号传输及微秒级路径 收敛。
【项目产出】 1. 基于蔚来提供的硬件,搭建一套端到端大带宽以太网实验台架,在该台架上达成以 上四个目标。台架包含但不限于硬件选型要求、软件、协议栈、配置、外设、测试 工具等。 2. 形成大带宽车载以太网架构演进策略,关键技术问题解决方案及验证数据。
【交付指标】 建立相关器件的测试方法及测试标准,并完成方法验证。交付物为测试工具及技术 文档,该测试工具需要能够流畅运行并复现测试结果; 设计合理的软硬结合架构,加速在大带宽下传感器信号高速接入车机算力。交付物 为软硬件 PoC 及技术文档,该 PoC 能够对比纯软件、纯硬件、软硬结合三类方案, 能够复现对比结果; 设计测量方法,定量评估以太网延迟增加对自动驾驶的影响。交付物为测试工具及 技术文档; 设计传输及路由协议,确保传感器及车机算力之间无损信号传输及微秒级收敛时间。 交付物为协议栈代码、测试工具、技术文档; 双方共同发表国际顶级期刊/会议论文至少 1 篇,并合作申请专利至少 1 件。