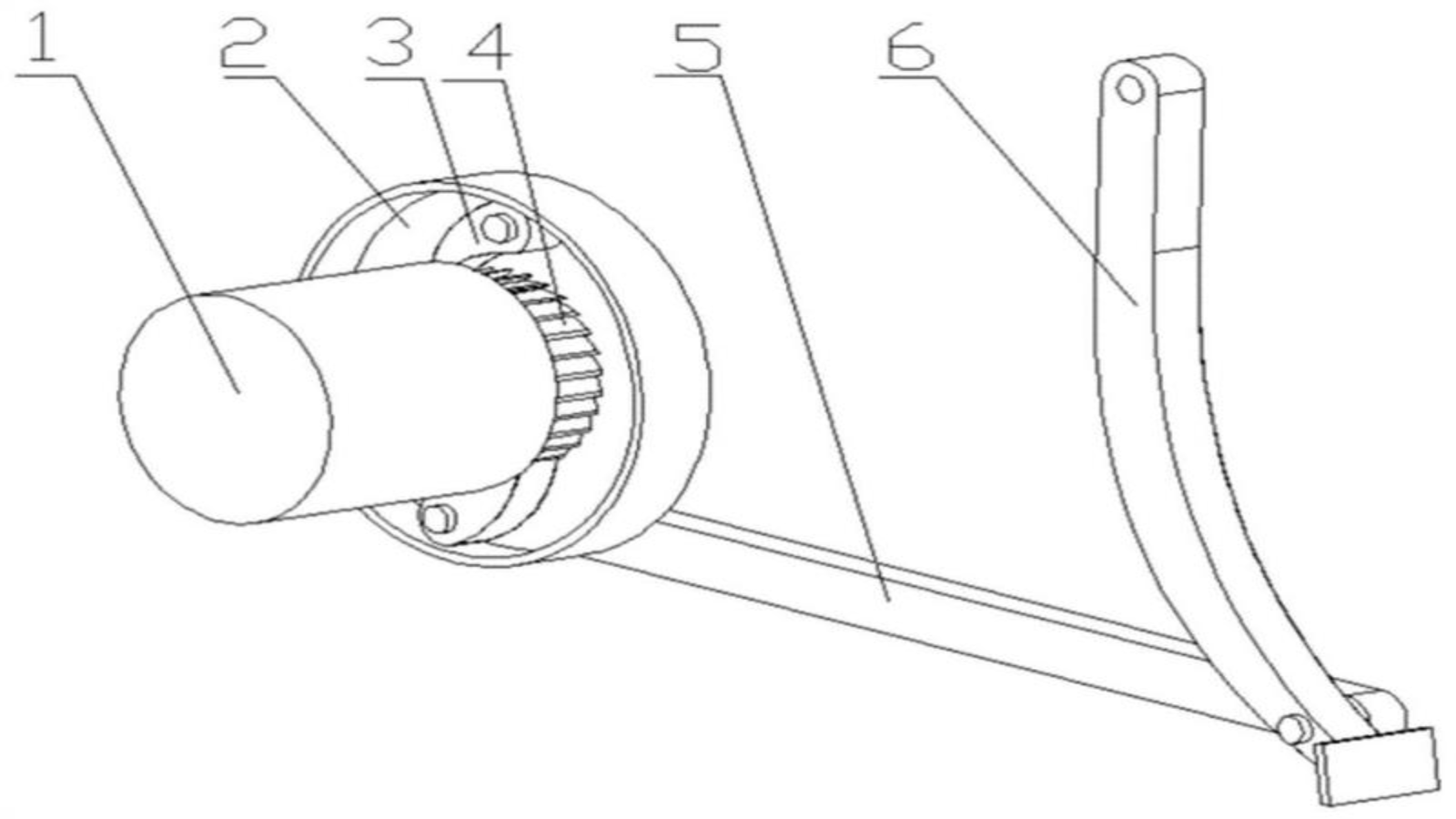
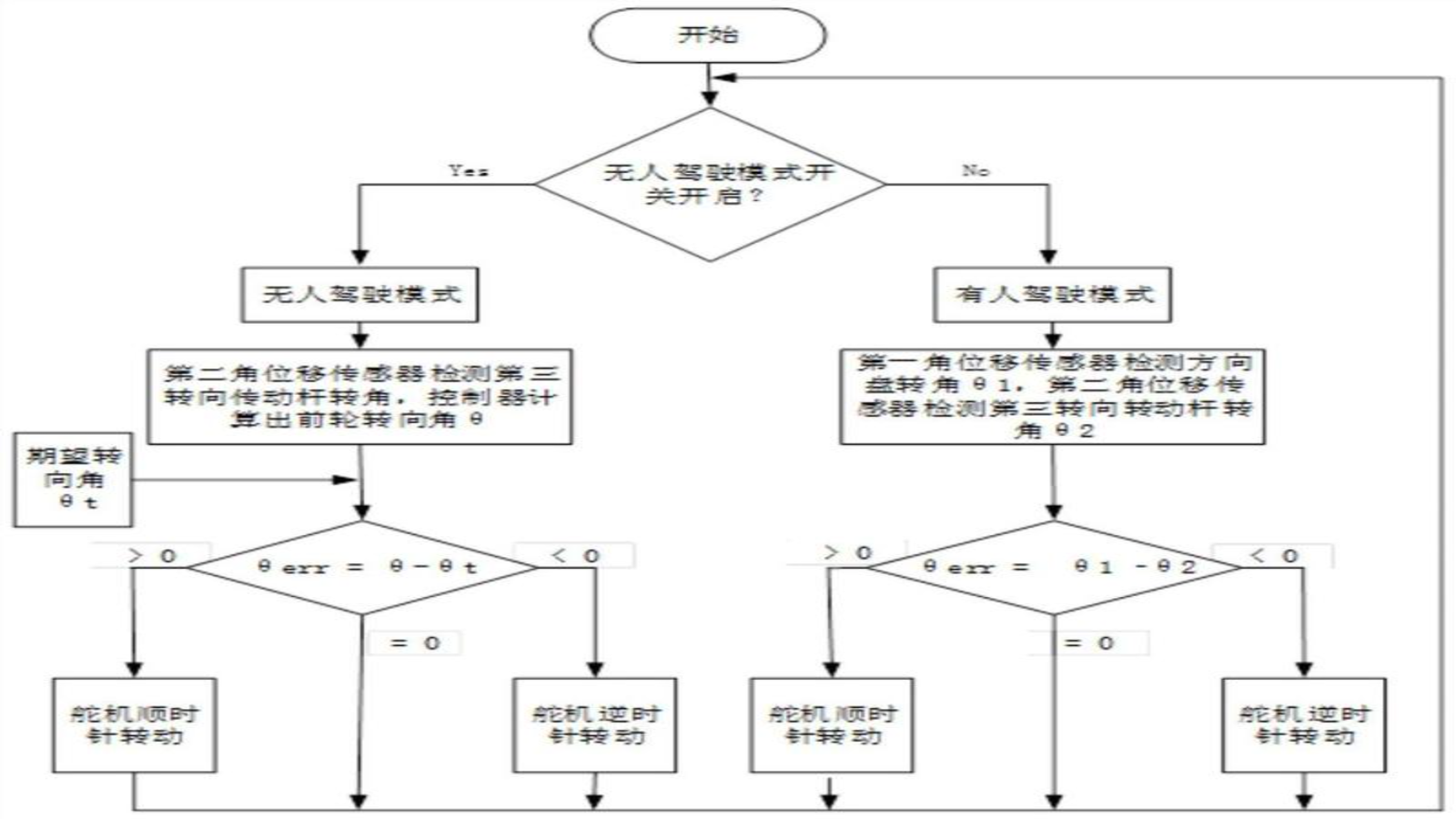
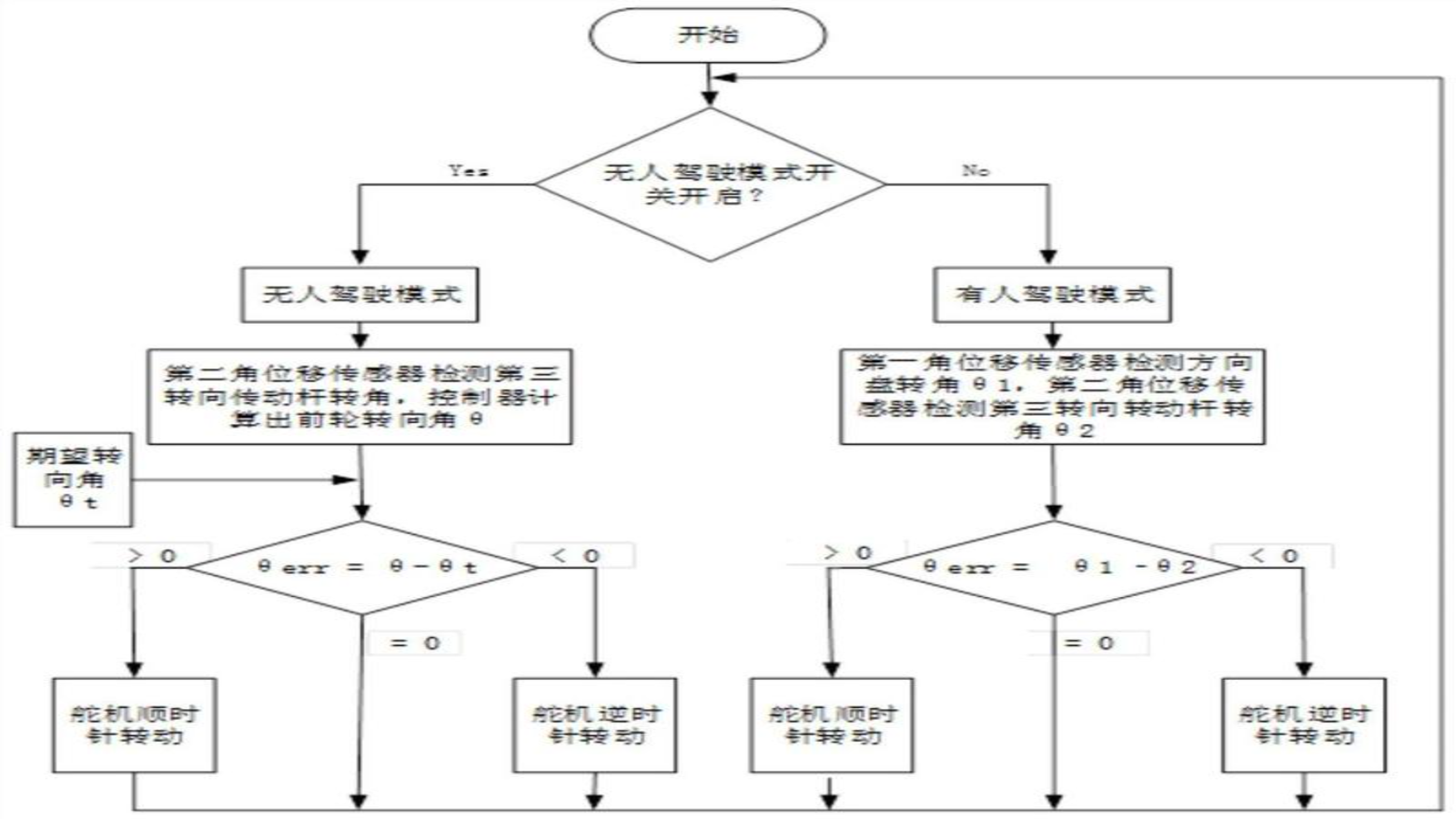
提供了一种无人驾驶方程式赛车通用转向系统及控制方法,本发明可实现赛车自动转向的精准控制,而且无需加装齿轮分离装置以消除转向舵机的巨大转向阻力,便可实现有人驾驶无人驾驶状态切换,结构简单,降低了无人驾驶方程式赛车的设计加工成本,具有一定的通用性。
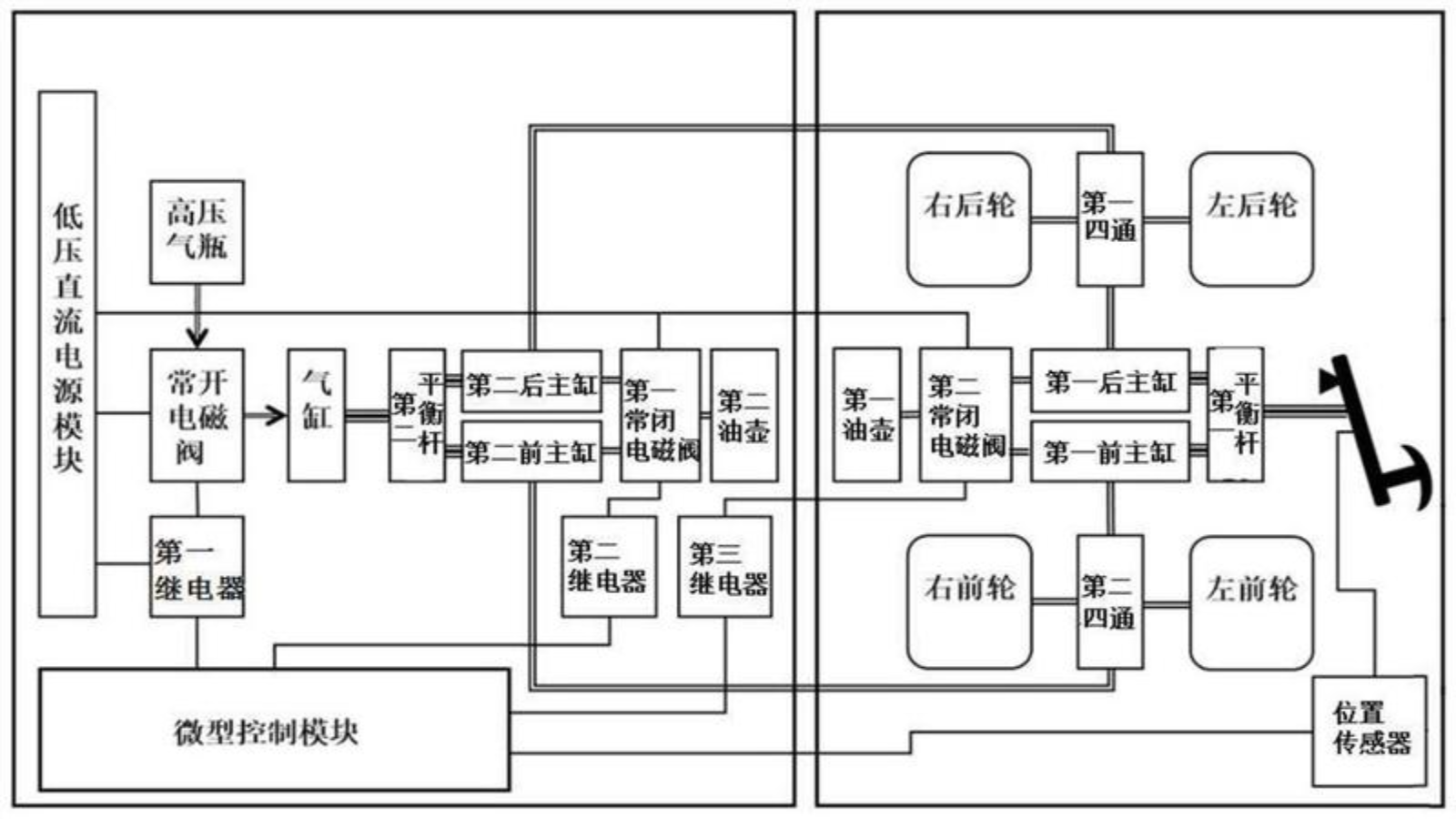
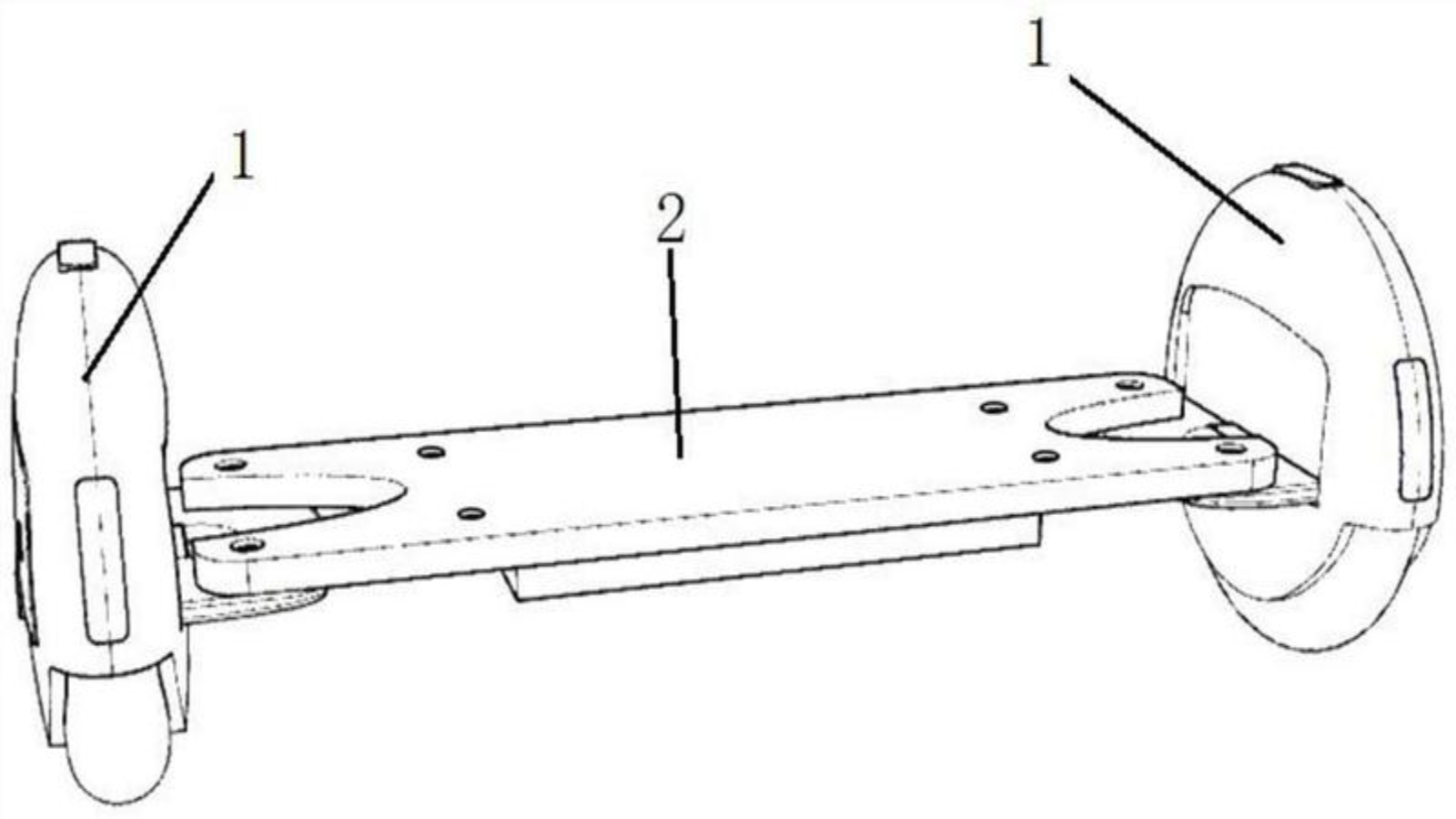
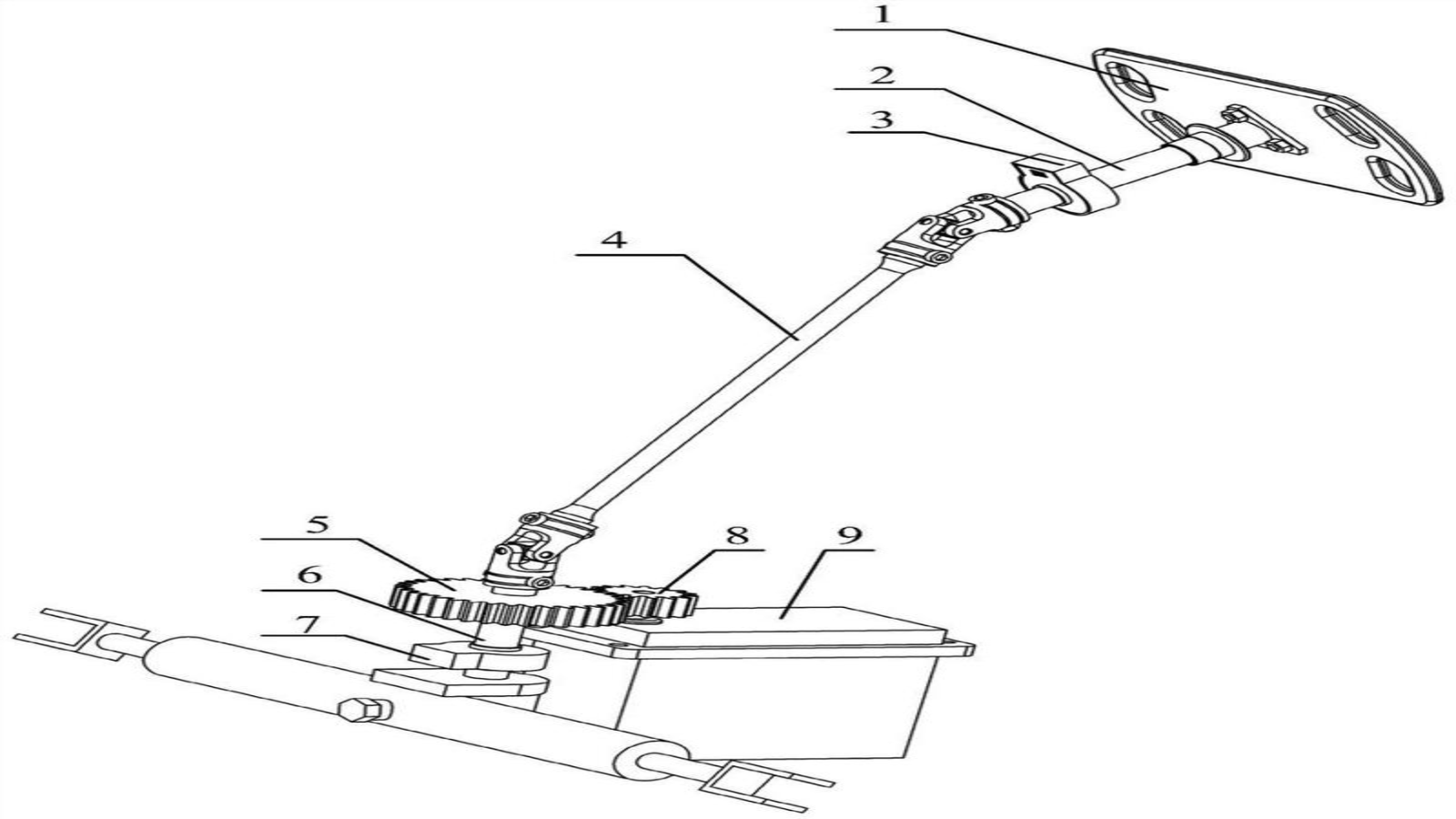
本发明涉及一种无人驾驶方程式赛车通用转向系统及控制方法,包括动力装置、与赛车前轮连接的用于监测转向角的转向角监测装置和与方向盘连接的用于监测方向盘转角的方向盘转角监测装置,其中,转向角监测装置通过第二转向传动杆与方向盘转角监测装置连接,动力装置与转向角监测装置联通,动力装置为整个转向系统提供动力;本发明可实现赛车自动转向的精准控制,而且无需加装齿轮分离装置以消除转向舵机的巨大转向阻力,便可实现有人驾驶无人驾驶状态切换,结构简单,降低了无人驾驶方程式赛车的设计加工成本,具有一定的通用性。