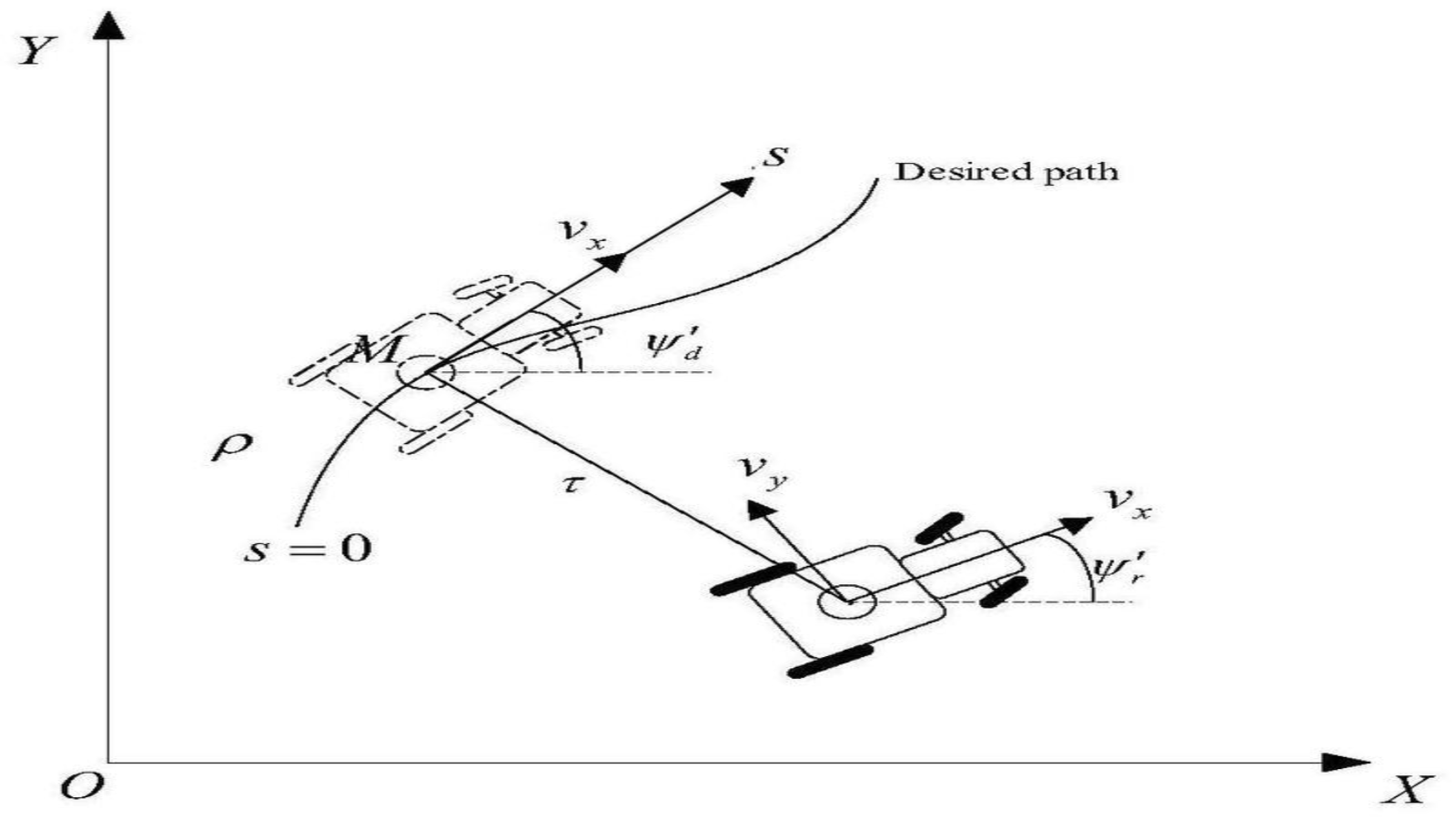
本发明公开了一种考虑驾驶员特性的差动辅助转向与共享控制系统建模方法。本发明的方法包括步骤(a)建立二自由度的车辆动力学简化模型和车辆质心位置在惯性空间下的坐标模型;(b)建立车辆轮胎的侧向力的简化模型;(c)建立车辆转向系统的转向柱动力学模型;(d)建立差动辅助系统作用下的驾驶员模型。本发明通过安装在转向柱上的转角传感器和扭矩传感器检测检测方向盘的角位移和作用于方向盘的力矩,将检测结果与车速、期望路径相结合,并考虑驾驶员特性按照一定的控制算法控制轮毂电机输出相应的差动力矩来辅助驾驶员更好的驾驶车辆。
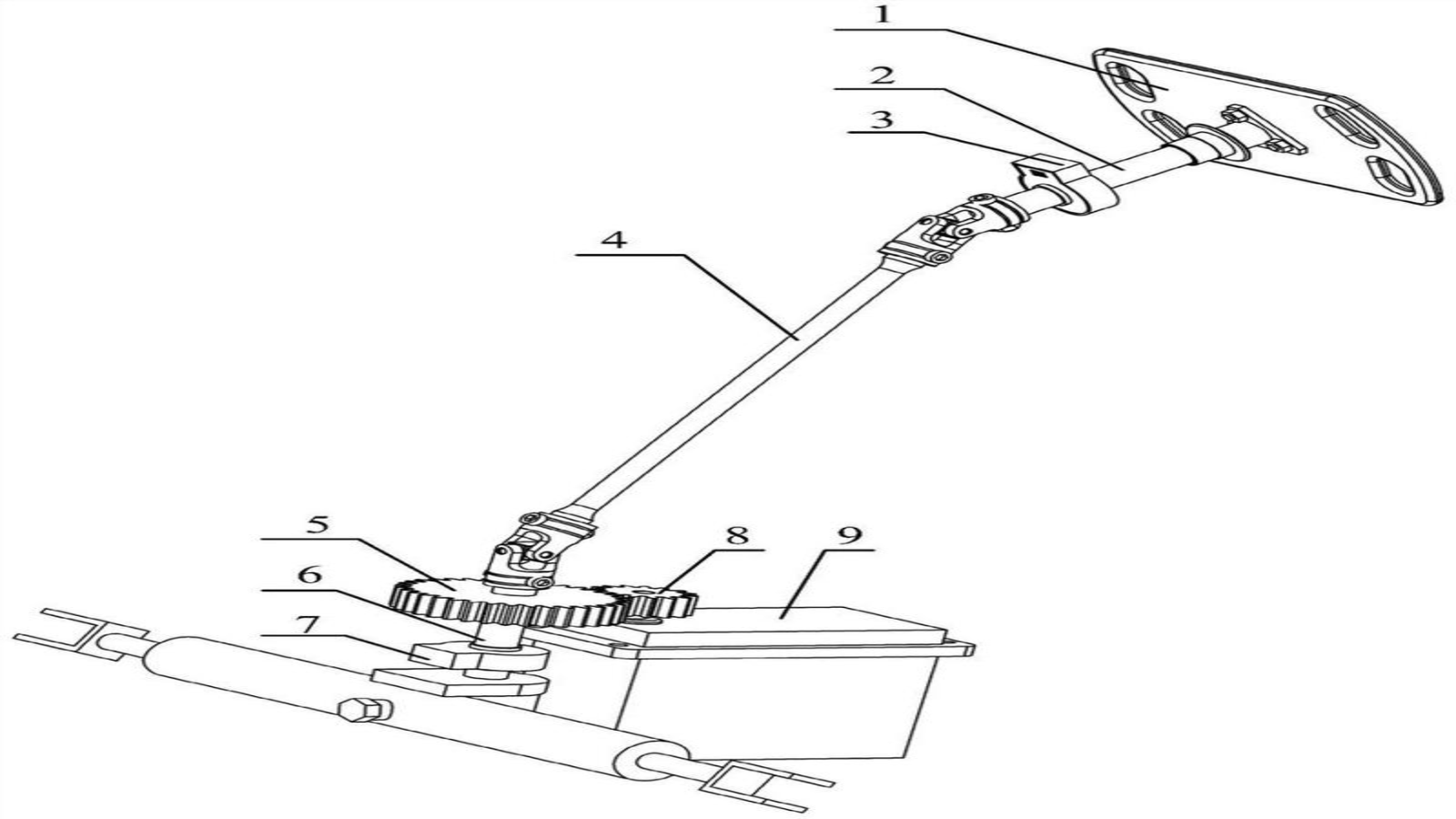
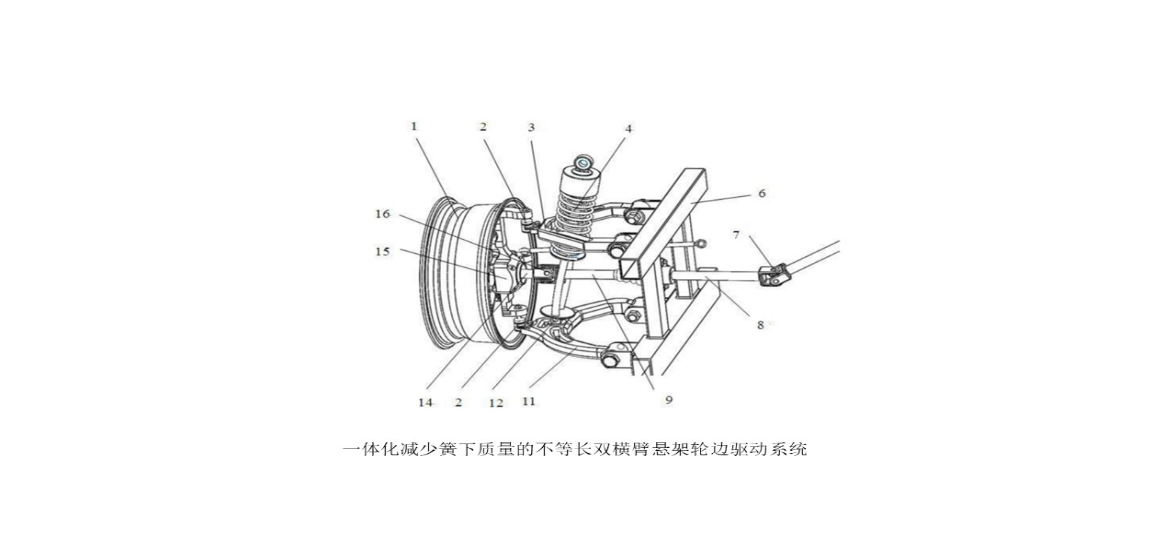
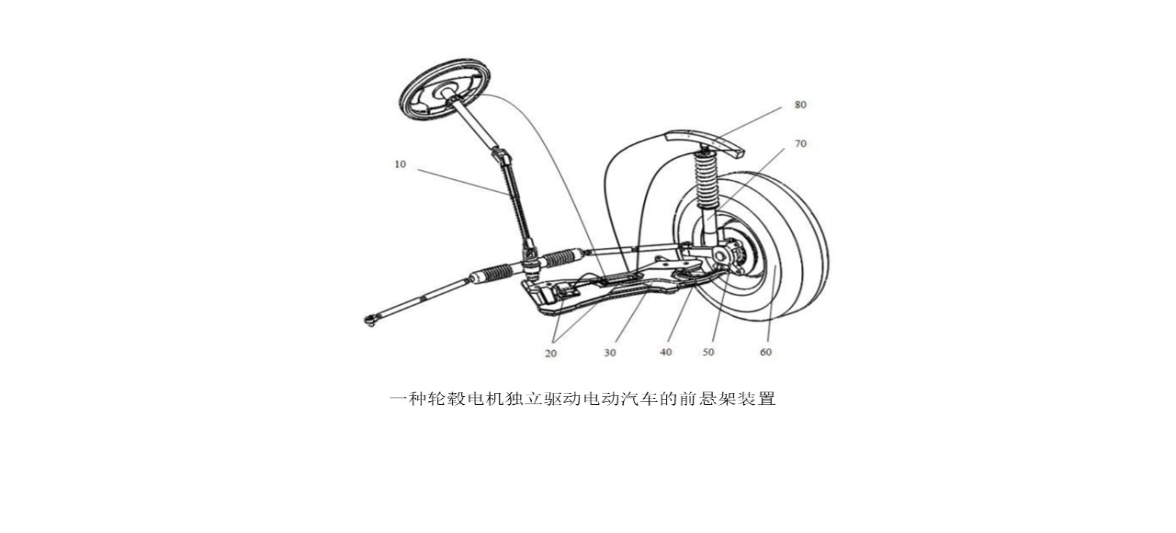
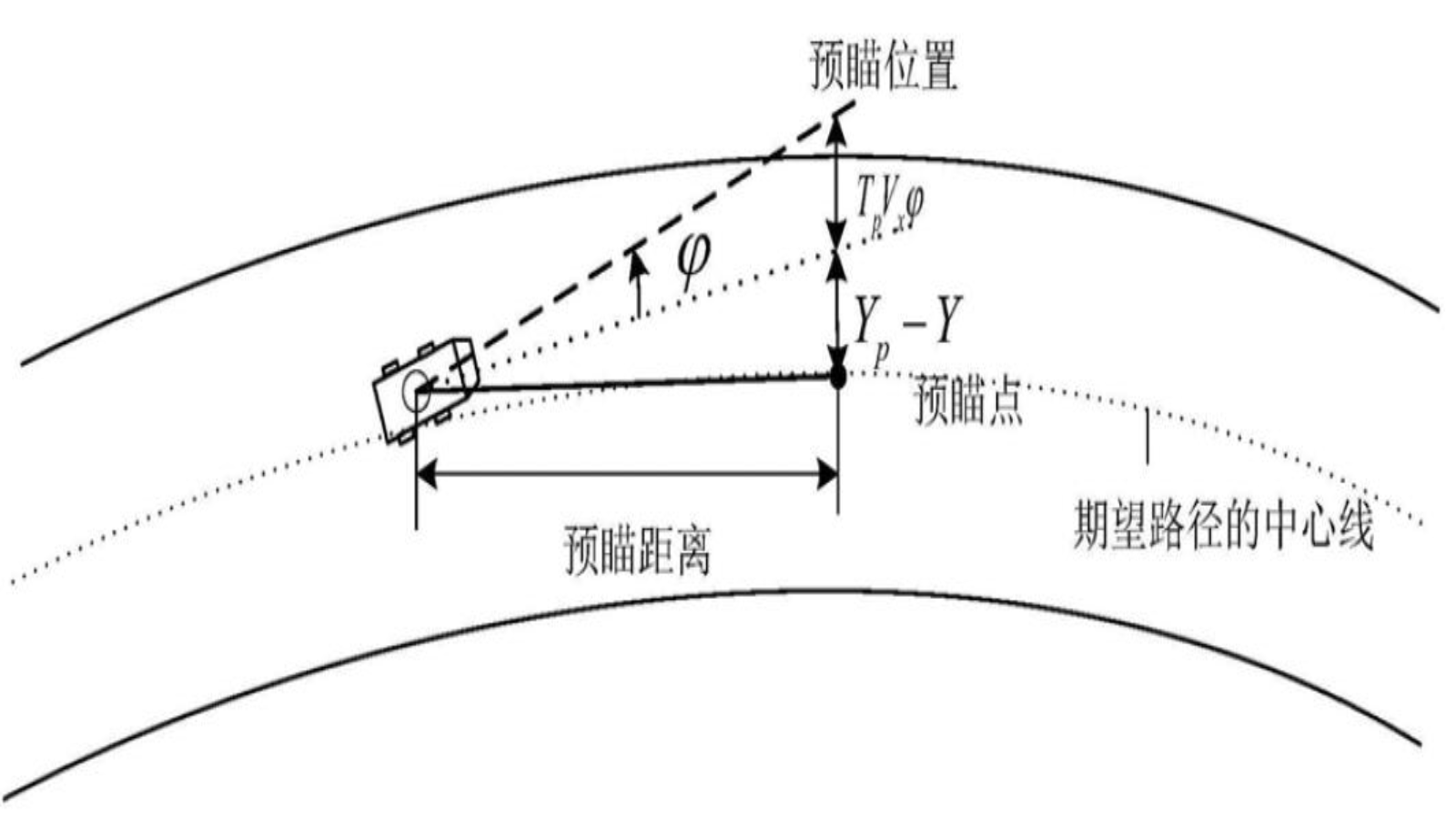
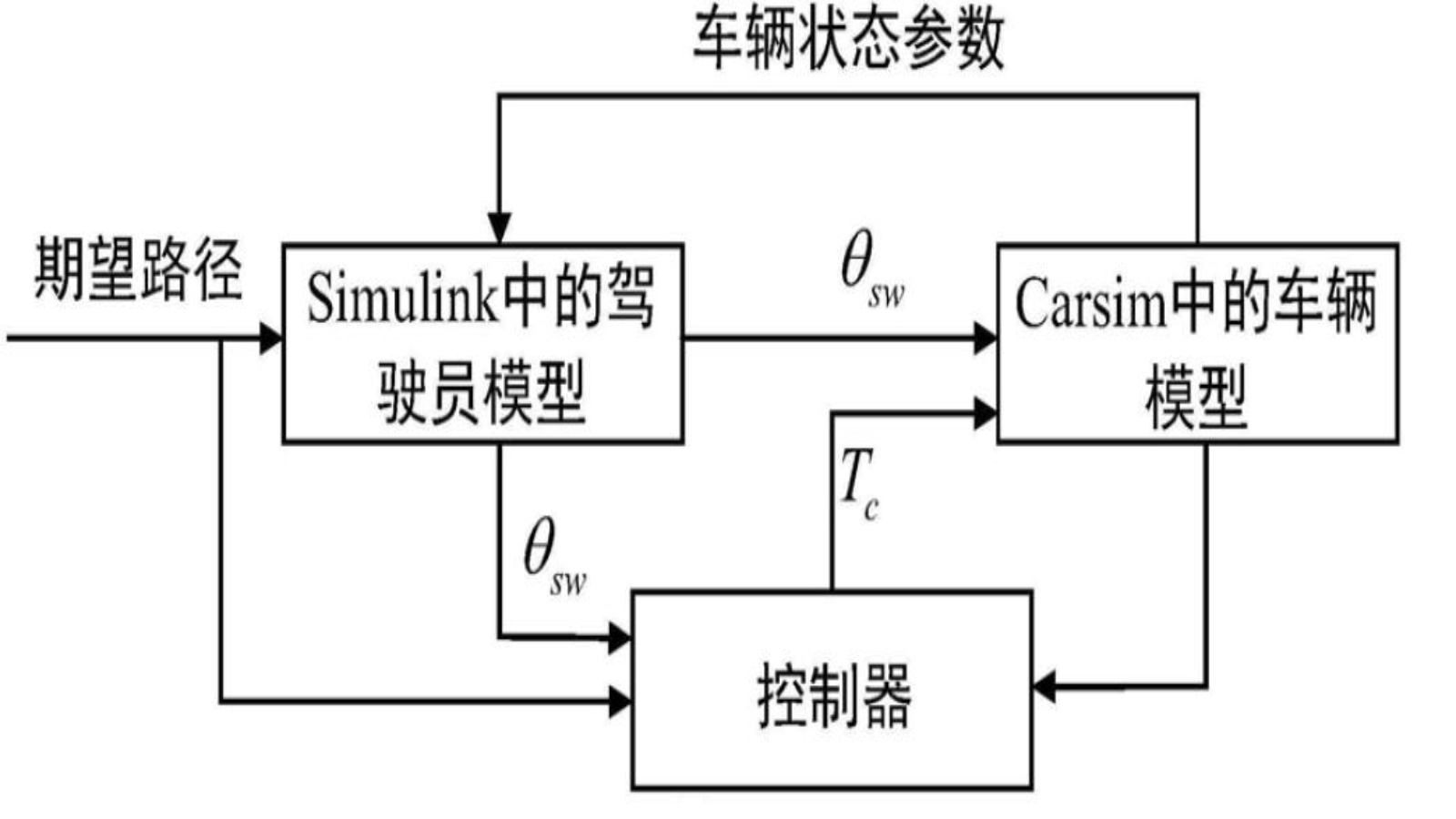
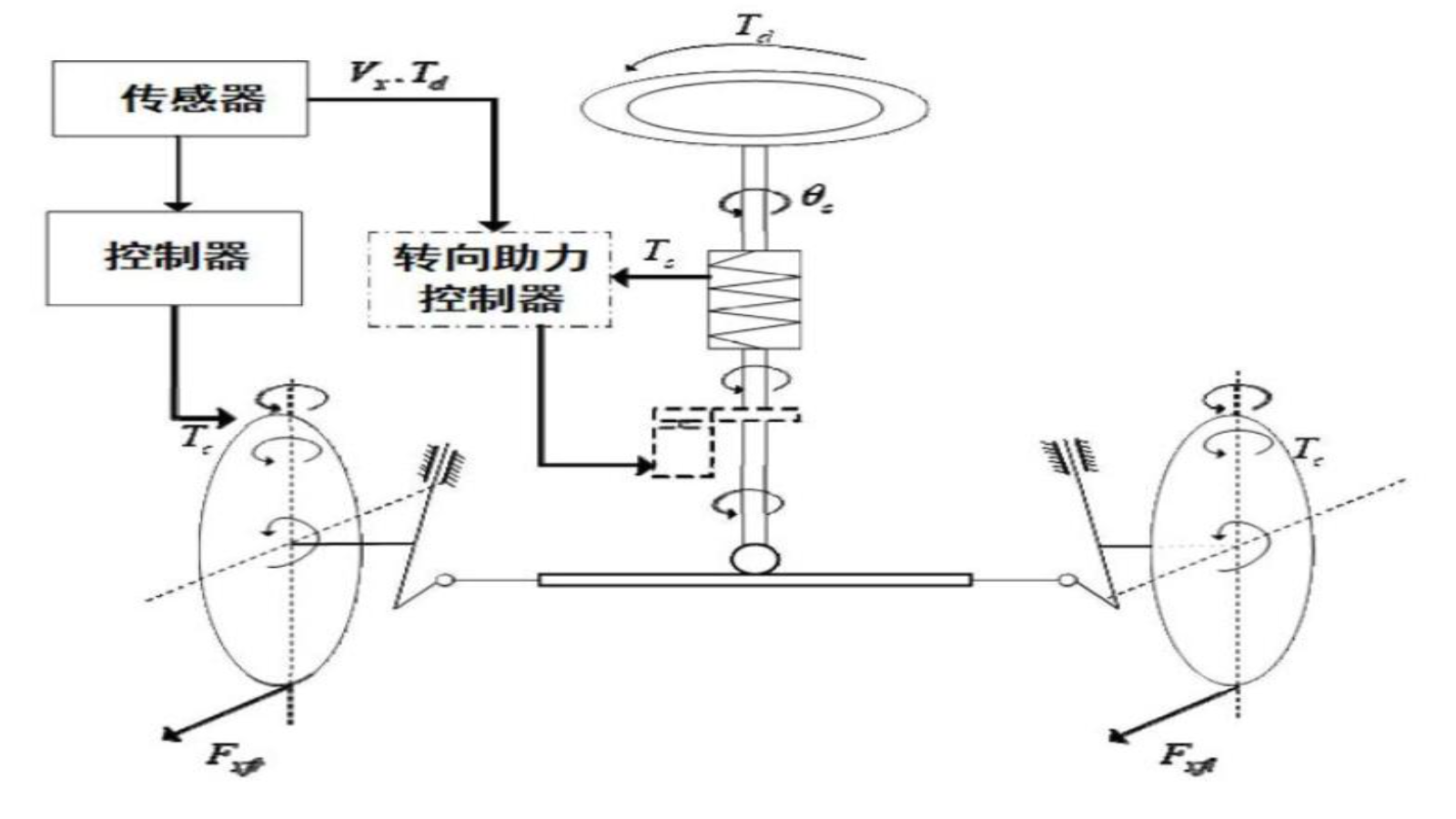
轮毂电机独立驱动车辆作为一种潜在的车辆结构,受到广大研究学者的青睐。由于轮毂驱动车辆的电机可以为车辆运动控制提供独立且灵活的驱动,以获得精确的扭矩响应。故选择具有更好驱动冗余和灵活性的差动转向作为辅助转向系统。车辆的转向系统由机械转向系统,方向盘转角传感器,扭矩传感器,电子控制单元,车速传感器,差动辅助系统控制器,转向助力电机及其减速机构,轮毂驱动电机等组成。差动辅助转向系统的工作原理是通过安装在转向柱上的转角传感器和扭矩传感器检测方向盘的角位移和作用于方向盘的力矩,将检测结果与车速、期望路径相结合,并考虑驾驶员特性按照一定的控制算法控制轮毂电机输出相应的差动力矩来辅助驾驶员更好的驾驶车辆。差动辅助系统工作时,差动力矩产生转向角的同时会有力矩反馈到方向盘上干扰驾驶员。故需要考虑驾驶员手臂阻抗模型的等效转动惯量,等效阻尼和等效刚度特性,从而减少了对驾驶员操作的影响,解决了差动辅助系统与驾驶员共享控制的问题。本发明的目的是针对上述存在的问题,提供一种考虑驾驶员特性的差动辅助转向系统与共享控制模型建模方法,该方法通过安装在转向柱上的转角传感器和扭矩传感器检测检测方向盘的角位移和作用于方向盘的力矩,将检测结果与车速、期望路径相结合,并考虑驾驶员特性按照一定的控制算法控制轮毂电机输出相应的差动力矩来辅助驾驶员更好的驾驶车辆。本发明根据二自由度的车辆动力学简化模型、车辆质心位置在惯性空间下的坐标模型、车辆轮胎的侧向力的简化模型、车辆转向系统的转向柱动力学模型以及建立差动辅助系统作用下的驾驶员模型,建立考虑驾驶员特征的差动辅助转向系统与共享控制模型。在模型中,考虑了差动辅助系统与驾驶员之间会相互干扰,故将驾驶员的一种手臂阻抗模型的等效转动惯量,等效阻尼和等效刚度特性代入差动辅助系统模型建立中。减少或去除驾驶员与差动辅助系统之间的相互干扰,提升驾驶员的驾驶体验,同时也提高行车安全性。