提供了一种基于动态规划算法的电动汽车能量管理和行驶方法,包括轮毂电机测功、求出道路坡度信息、获取自身状态以及前车的状态和最优的分配力矩和行驶方法,为其他用于能量管理的控制算法的控制效果提供对比的基准,具有广阔的应用前景。
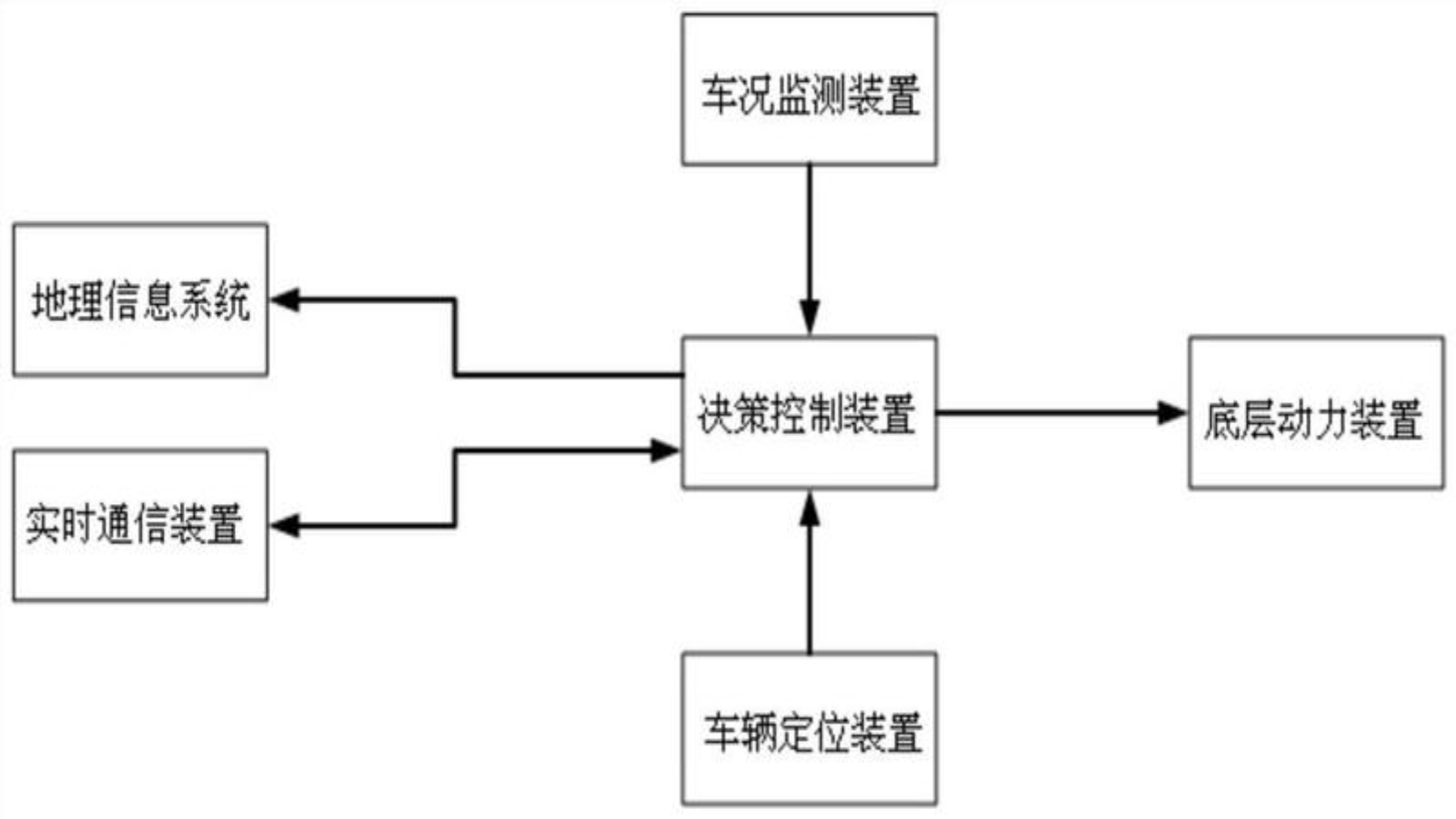
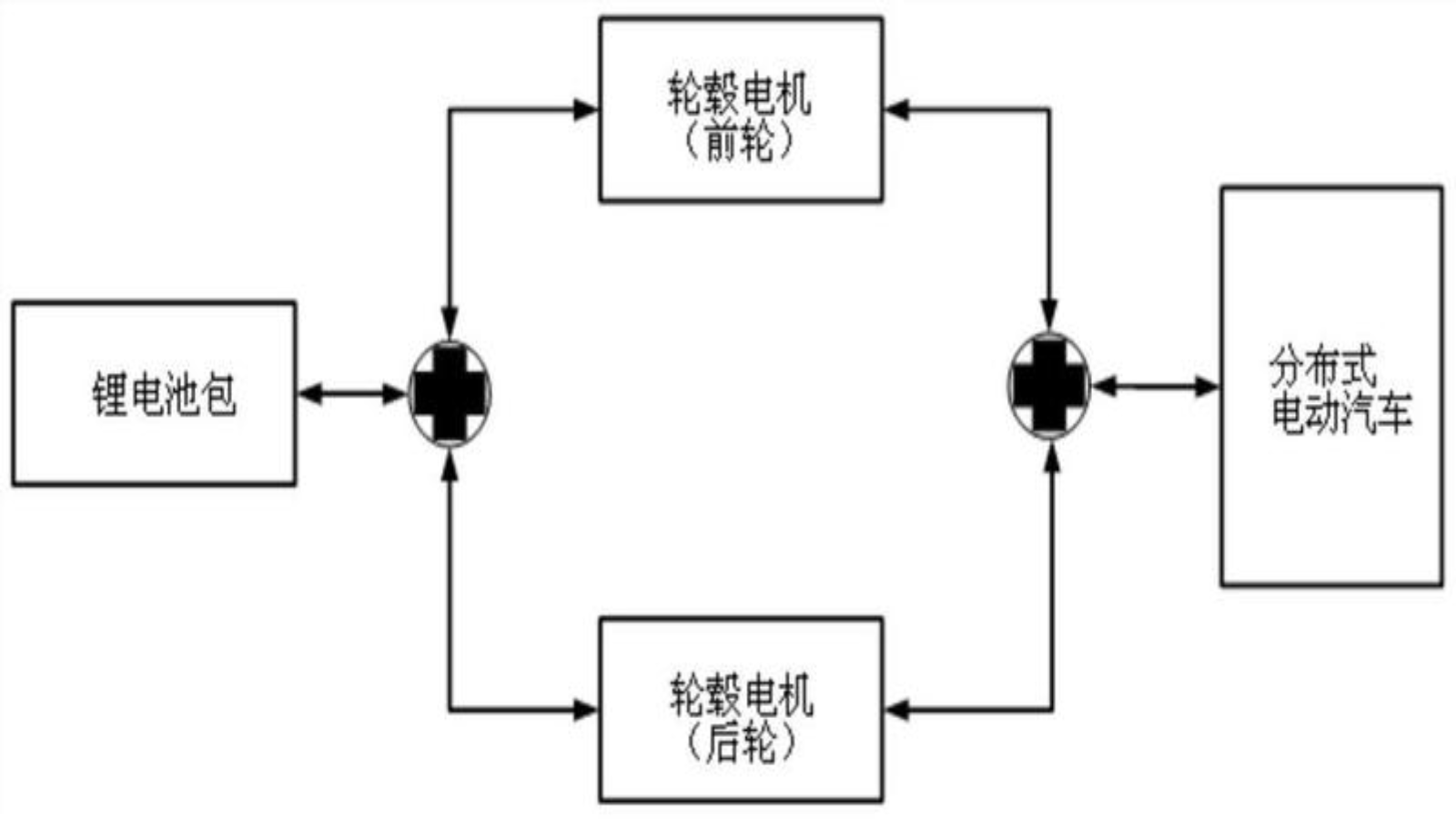
本发明涉及一种基于动态规划算法的电动汽车能量管理和行驶方法,包括分布式电动汽车的轮毂电机测功;利用地理信息系统及车辆定位装置获取信息求出道路坡度信息;利用车况监测装置获取自身状态以及前车的状态;基于动态规划算法递归地求出电动汽车行驶过程中全局最优的分配力矩和行驶方法;本发明可以为其他用于能量管理的控制算法的控制效果提供对比的基准,具有广阔的应用前景。