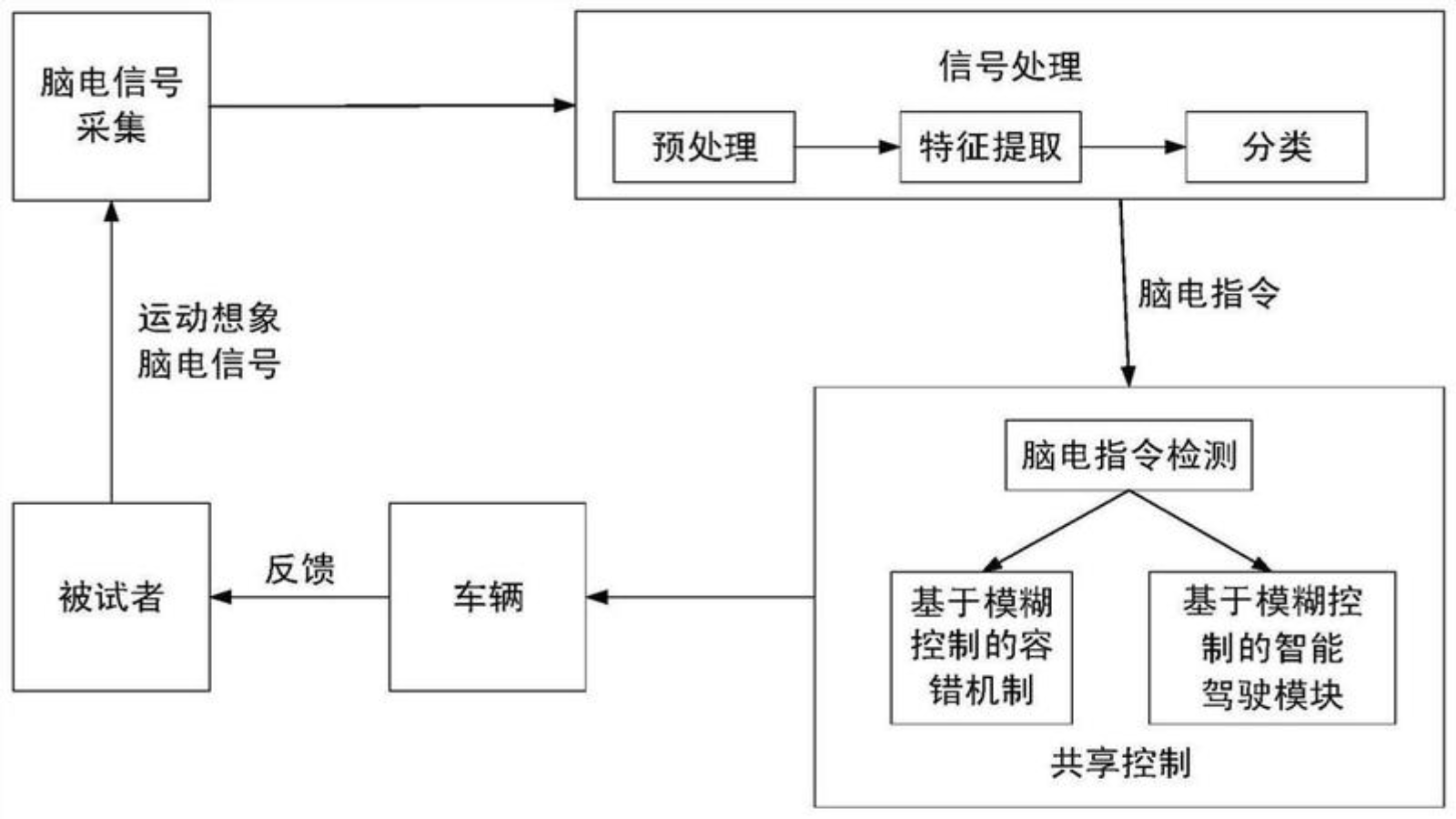
提供了一种基于模糊控制的脑控车辆共享控制方法,有两种机制,分别为基于模糊控制的容错机制和基于模糊控制的智能驾驶机制,弥补了脑机接口识别错误率高、实时性差、命令数受限等问题,大大提高了脑控车辆在未知环境下的安全性。
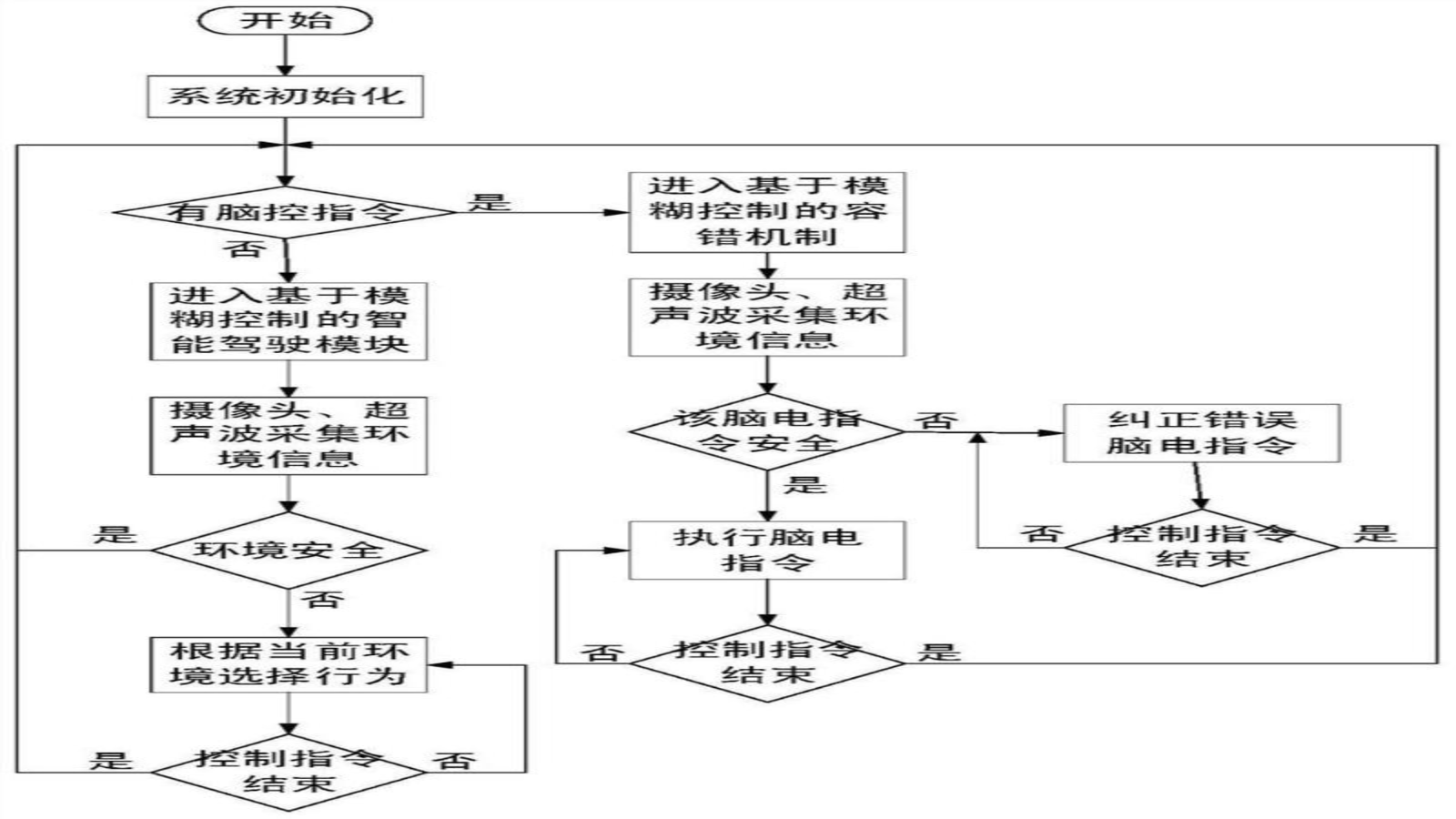
本发明涉及一种基于模糊控制的脑控车辆共享控制方法,车辆行驶过程中,当在线识别到有运动想象的脑电指令产生时,车辆进入基于模糊控制的容错机制,当没有识别到运动想象的脑电指令时,车辆则进入基于模糊控制的智能驾驶机制;本发明既能对错误的脑电信号就行纠正,也能够在没有脑电指令的情况下自主监督车辆,弥补了脑机接口识别错误率高、实时性差、命令数受限等问题,大大提高了脑控车辆在未知环境下的安全性。