驾驶员行为大数据分析与智能汽车“影子驾驶”方法研究 正在研发
完成人:高镇海
单位:吉林大学
地区:吉林省 长春市
领域:
电子电器零部件 汽车导航系统/音响装置/智能网联 远程信息
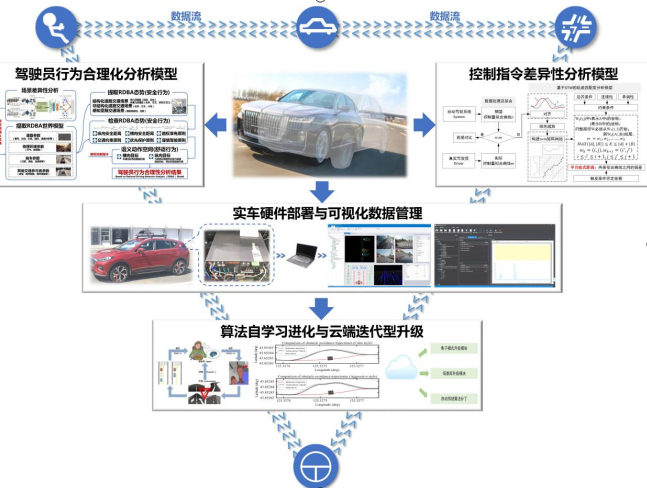
针对自动驾驶系统在无限场景下的测试与验证问题,以驾驶员操控行为数据、车辆行驶状态数据及道路交通环境数据为驱动,创新性的提出了智能汽车影子驾驶系统,解决了“人-车-环”系统中特征数据的高效过滤、精准采集问题,实现了在驾驶行为大数据中人车差异性数据的自动触发式记录控制。同时,基于对驾驶人行为大数据的分析,构建了驾驶人行为合理化分析模型,解决了驾驶人个性化行为决策的合法、合情、合理的判定问题,实现了连续场景下驾驶员操控行为的形式化表达,为实现自我进化型智能汽车设计提供设计依据。
应用领域
本成果构建的驾驶人行为大数据分析方法与智能汽车影子驾驶系统,可推广应用于车企的L2及以上智能汽车上。通过对人车差异性数据的自动触发式记录与在线可视化管理,可实现自动驾驶算法的自学习进化与云端迭代型升级,提升自动驾驶系统对复杂环境及陌生、突发等场景的适应能力,最终实现自动驾驶的“千人千面“控制。
关键领域
关键技术:
1.海量数据的精确采集、快速传输、高效存储
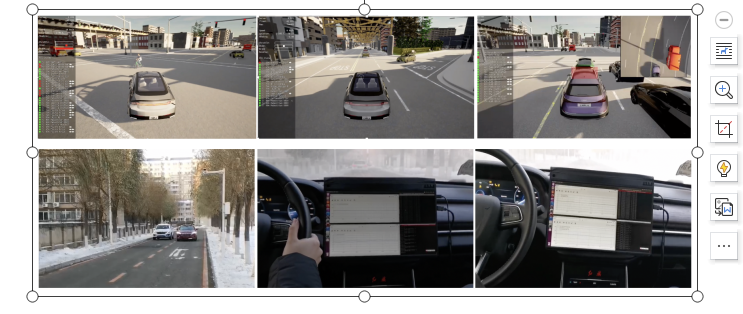
2.基于环感数据的高逼真度仿真场景还原
3.人车差异性特征数据的精确触发控制
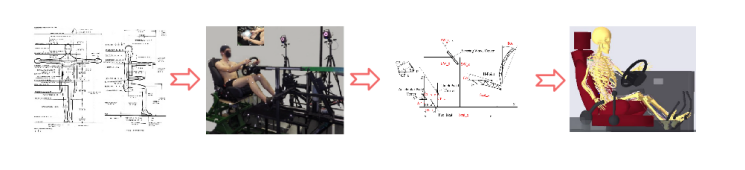
4.建立驾驶员驾驶行为的合理化表达模型
5.多源传感器联合标定与融合感知
6.人车差异性成因评估及精准定位
7.触发控制算法优化及触发执行逻辑优化
优化后自动驾驶算法的再评估
技术指标
1.硬件设备可实现:车周视频数据采集、激光雷达数据采集、总线数据采集、惯导定位数据采集、毫米波雷达数据采集、数据同步、数据存储;
2.软件平台和实现:工程创建管理、采集数据的在线显示(包括视频、 雷达、总线等)、整体系统的状态监控(包括设备、 软件、系统状态)、 数据打标(自动打标、手动打标)、场景报告(主要用于回放);
3.可采集16路CAN(CANFD)、16路 LIN、2路Flexray,DB9接口,其中包括一路OBD接口,功能强大,使用方便快捷,记录类型多,节省测试时间,提高测试效率;
4.所有数据源真同步,同步精度小于1ms,所有数据具有同一时间戳,回放分析以及数据切片时,保证所有数据是同步的,利于分析不同场景;
5.多摄像头同步曝光,保证多摄像头是在同一时刻抓取视频帧;
6.ADAS数据采集优势相机支持GMSL等多种LVDS接口,支持高分辨率(4k/2k/1080p等多种分辨率)视频数据高速率完整传输;
7.支持多复杂触发逻辑并发运行,且触发支持手动与自动触发总线数据无损传输,不丢帧,保证数据完整性。