
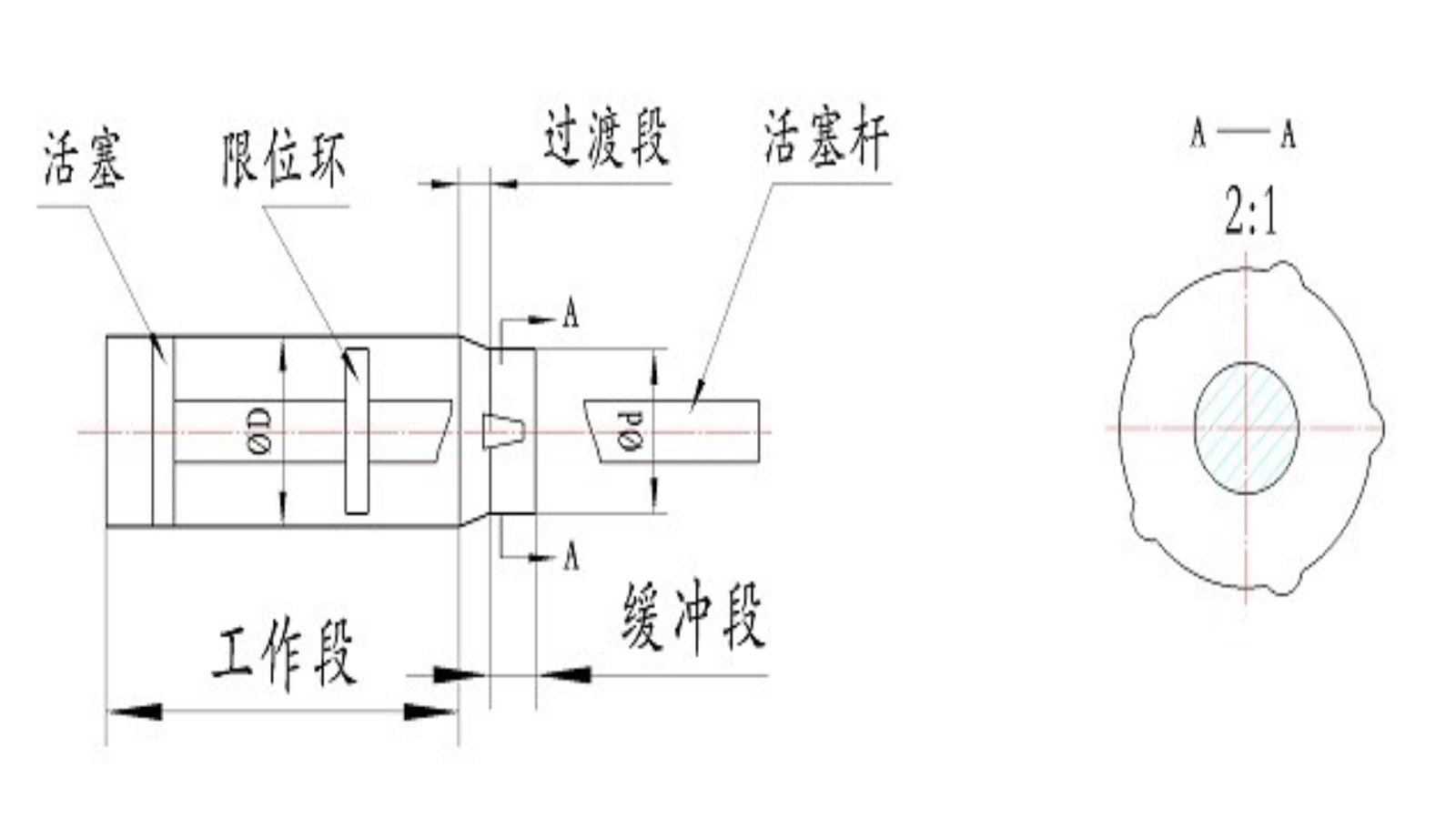
(1)采用液压限位缓冲结构代替传统橡胶块缓冲结构,不仅保证了极限位置的限位缓冲功能,同时提高了缓冲结构的使用寿命。 (2)采用缩径液压限位技术,避免了拉伸极限位置时减振器活塞与其导向套的刚性撞击,即提高了悬架在极限位置的减振性能,又实现了与不同类型悬架性能要求的合理匹配。 (3)采用双活塞液压限位技术,在减振器极限位置产生附加阻尼,避免了减振器活塞与其导向套的刚性撞击,同时改善了汽车在恶劣路面上的行驶平顺性。并通过调整浮动活塞上细长孔的数量及端面尺寸调整附加阻尼的大小,实现附加阻尼力与使用工况的合理匹配。

四轮独立电驱动汽车集成控制软件采用分布式集成控制方式,集成控制软件加载在整车控制器中,通过软件的运行使整车控制器发出相应的控制指令,来分别控制四个转向电机控制器、四个驱动电机控制器和液压控制单元的动作。分布式集成控制的集成程度高,有新的子系统加入不需要对软件程序进行颠覆性的修改,各个子系统可以单独设计,融合性强,缩短了整车控制策略的开发周期,是实现整车控制的理想选择。
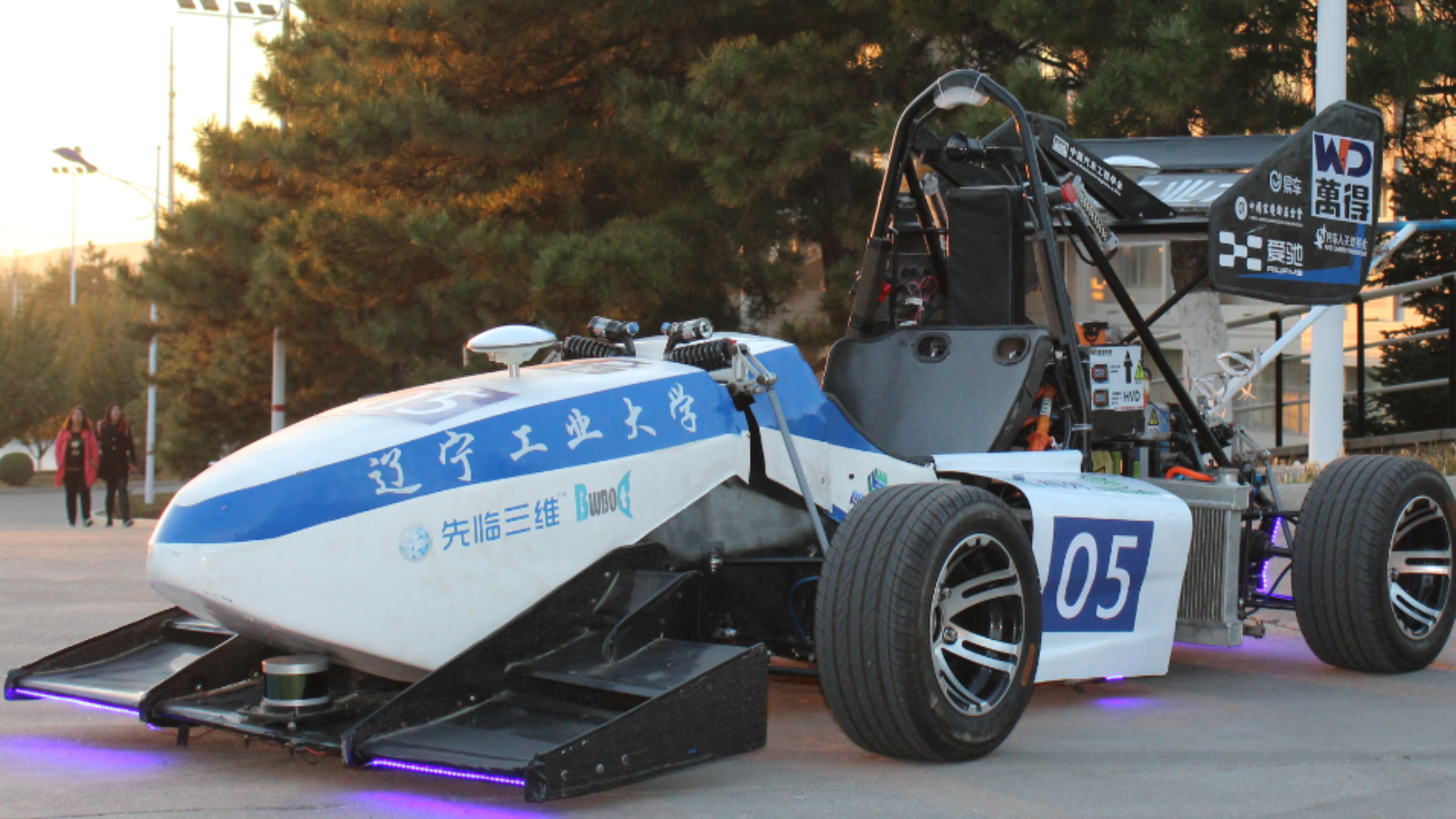
(1)驱动与传动系统高度集成化,左右驱动桥可独立拆装且轻质高效,采用行星齿轮减速箱传动效率高大97%以上。 (2)采用碳纤维不等长横臂四轮独立悬挂,质量轻强度高。 (3)采用碳纤维复合材料空气动力学套件,在90km/h的车速下可提供不小于600N的下压力,赛车高速下操控性能优越。 (4)双电机驱动力矩可以独立控制,可实现牵引力控制算法TCS的验证、驱动横摆力矩控制算法DYC的验证。 (5)自主开发整车电控系统、环境感知和路径规划算法。
