一种无人驾驶拖拉机自动换挡通用装置,包括纵向和横向两个部分,纵向矩形换挡框通过螺栓与纵向电动推杆自由端固联;横向驱动装置包括套设在挡杆上的横向矩形换挡框和横向电动推杆,横向矩形换挡框通过螺栓与横向电动推杆自由端固联实现换挡,本发明实现了无人驾驶拖拉机自动换挡精确控制,稳定可靠,安装方便,不改变拖拉机原有结构,具有通用性。
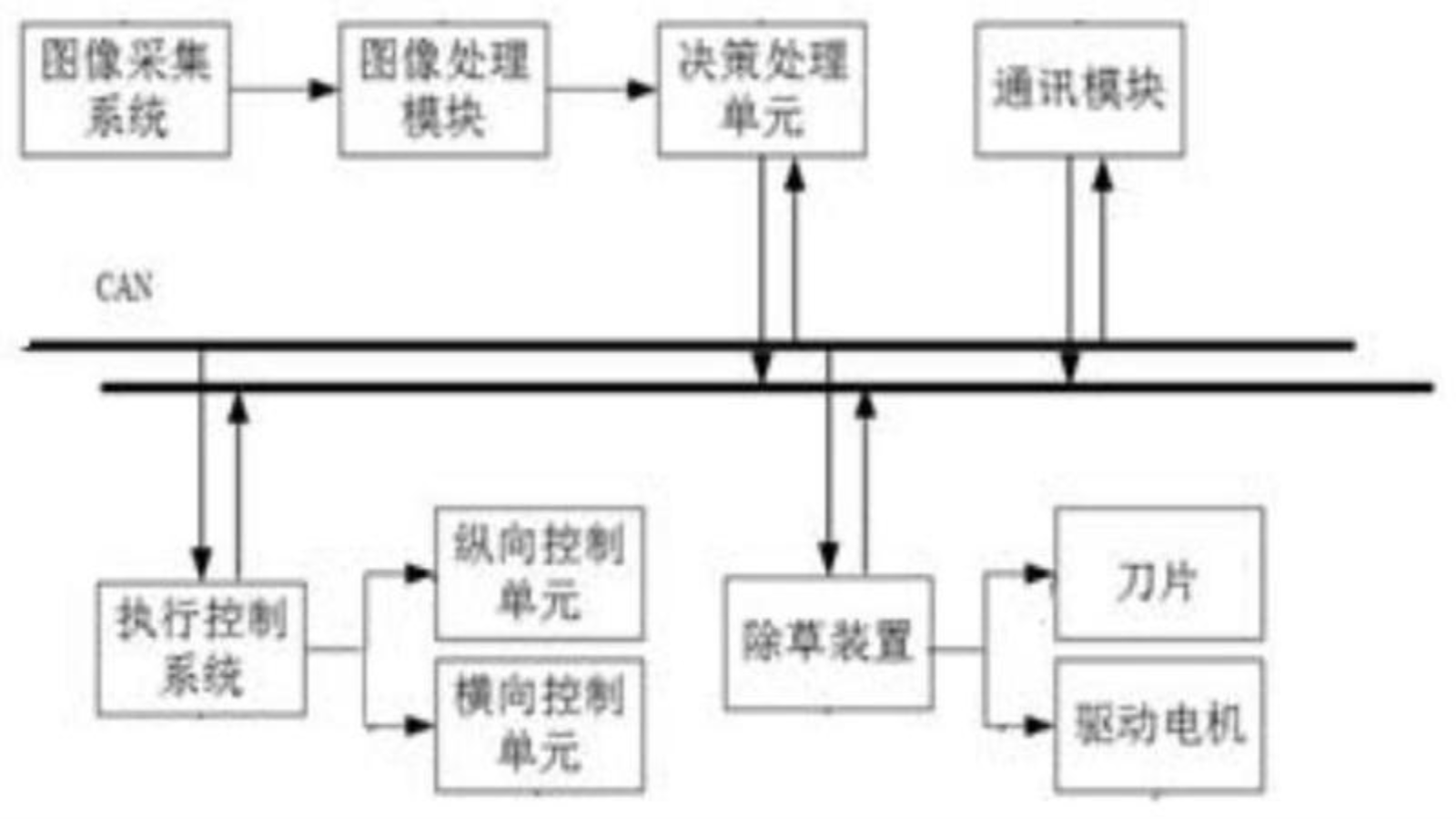
提供了一种一种果园自动驾驶除草拖拉机,实现拖拉机本体在果园行间杂草的一次性清除,在不借助昂贵的激光雷达以及全球定位系统的前提下,实现有限场景下的自动驾驶功能,具有成本低,固定作业场景稳定实现等优点,可普及性高。
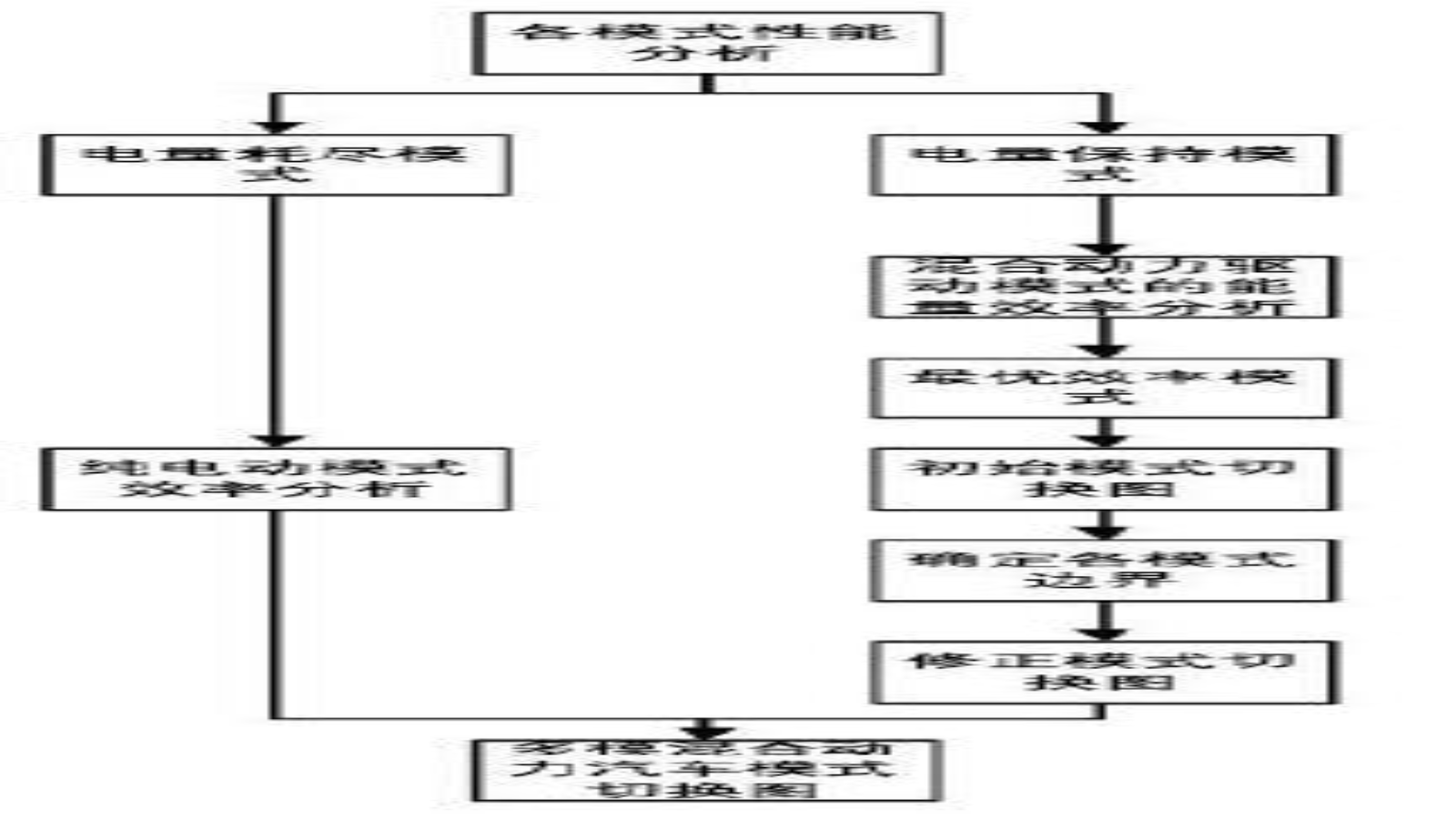
本发明提供了一种多模混合动力汽车模式切换图的正向设计方法,从能量效率、模式切换能量损耗与最大输出扭矩等多个角度对模式切换图进行讨论与分析,并从中总结出一套多模混合动力汽车模式切换图的正向设计方法。不仅能够提高车辆经济性,还能提高模式切换的平顺性,降低由模式切换引起的冲击与能量损耗。

自主开发的车辆液压同步转向控制系统是国内首次实现液压系统同步转向功能,实现工程车辆、重型车辆、农业车辆同步转向功能,可极大地降低车辆操作人员的劳动强度、提高驾驶员的安全性以及方向感,提高操纵稳定性、打破国外的技术封锁,提高国内液压转向车辆同步转向水平,形成自主知识产权的同步转向产品。
本成果针对无死区三相AC/DC双向变流器,研究了其关键技术,针对桥式拓扑存在桥臂直通这一问题,在不增加可控开关器件的前提下,研究无死区AC/DC变流器拓扑的生成规律,提出了一种无死区变流器拓扑的生成方法,并利用该方法生成了双Buck/双Boost拓扑,采用半周期控制方式以提高效率,提出了一种抑制电流过零畸变的控制方法,通过纹波电流负反馈改变三相电流过零点附近的基准信号,从而减小导致过零畸变的高频纹波电流。

新能源汽车整车控制器VCU从硬件、基础软件、应用层策略、BootLoader、程序刷写软件,全系列硬软件均开发,目前已经给国内主机厂实现批量供货,配套车型超过5个。
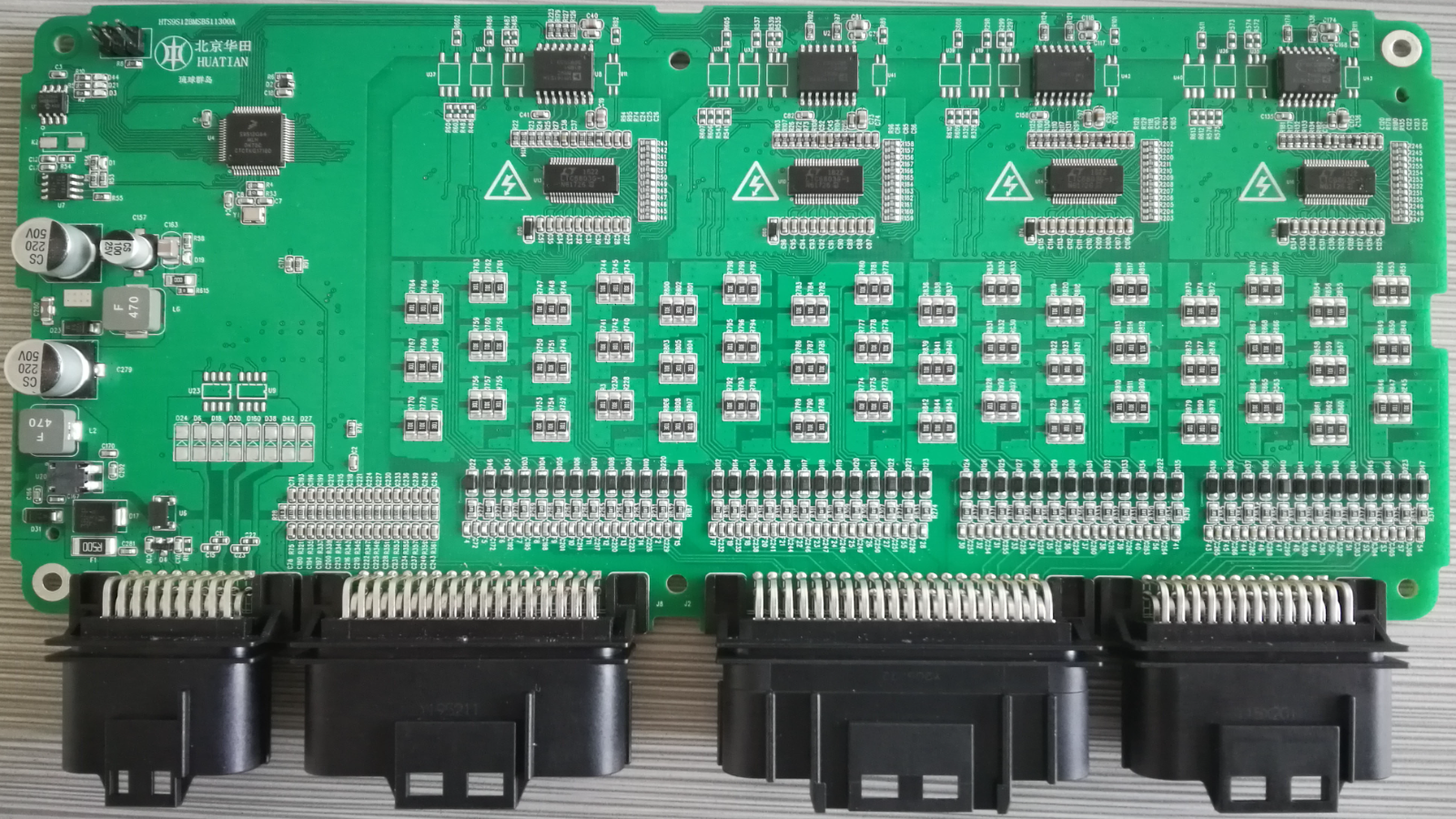
新能源汽车电池管理系统BMS包括主板和从板,从硬件、基础软件、应用层策略(基于Simulink模型开发)、BootLoader、程序刷写软件,全系列硬软件均开发,目前已经给国内主机厂实现批量供货,配套车型超过5个。

智能前大灯系统通过摄像头及目标检测算法对前方车辆及行人进行识别,根据识别结果对汽车远光灯进行自动控制,有选择性地遮蔽远光灯光束范围,让光束避开对面车辆,在确保驾驶员清晰视野的同时,不会影响对向来车的行驶,使驾驶员不需要频繁切换远近光去避免前方眩目,提升夜间行车安全。

接触网作业车智能辅助驾驶系统实现在监控、调车等场景下替代驾驶员对作业车进行智能控制,实现作业车自动驾驶,或辅助司机进行驾驶工作;保证作业车平稳安全运行且符合限速要求;实现在库内短距离遥控控制车辆前进后退至指定位置停车;实现驾驶员在非驾驶位短距离移动车辆。具有紧急切换功能,实现紧急状态下司机接管车辆控制。
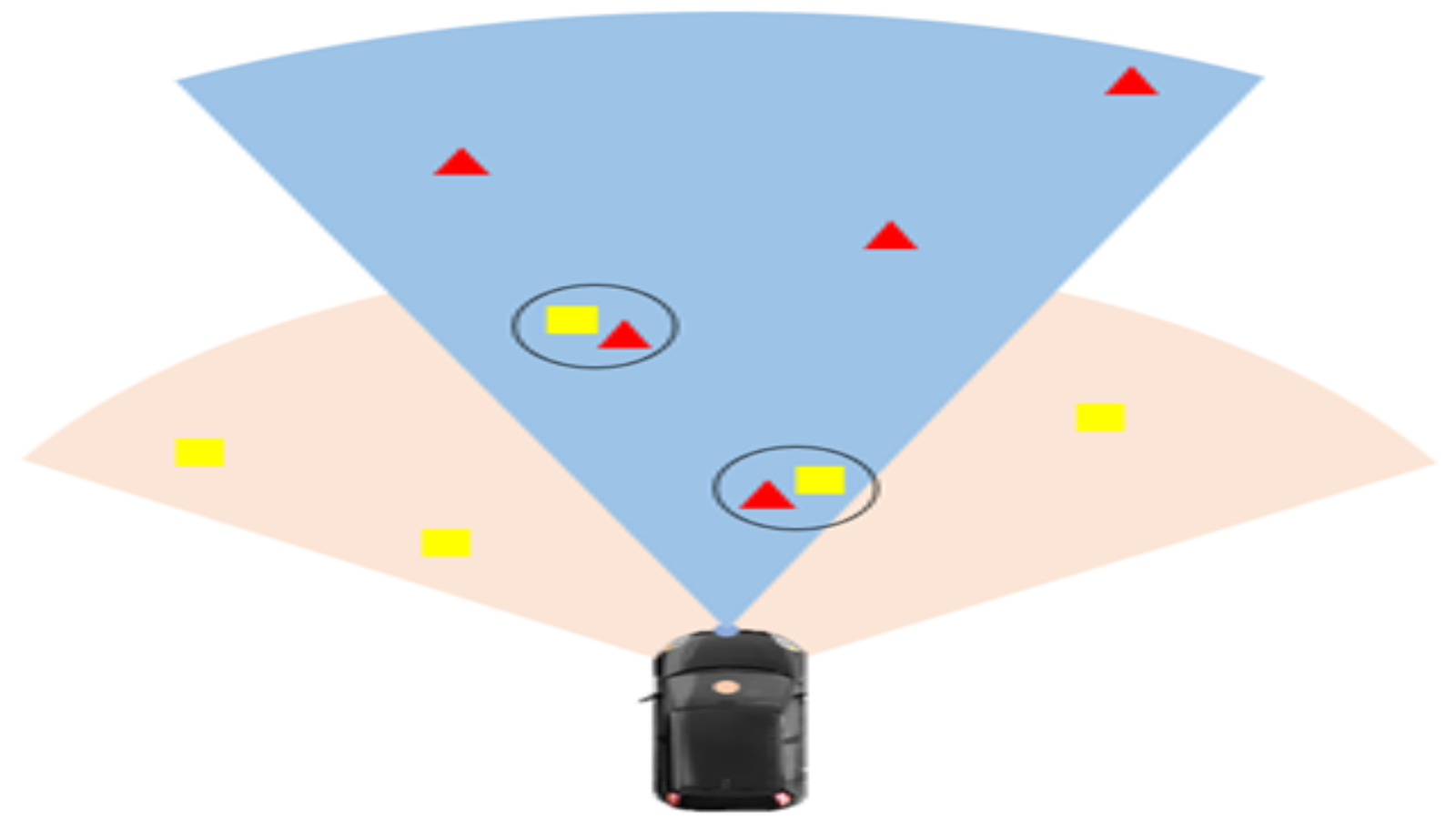
随着大数据、云计算和 5G 技术的成熟, 智能驾驶快速发展。车辆识别是智能驾驶的重要技术之一,针对传统单一传感器方法识别效果差、易受干扰等缺点,利用毫米波雷达与摄像头实现对路面障碍物的检测与定位。