
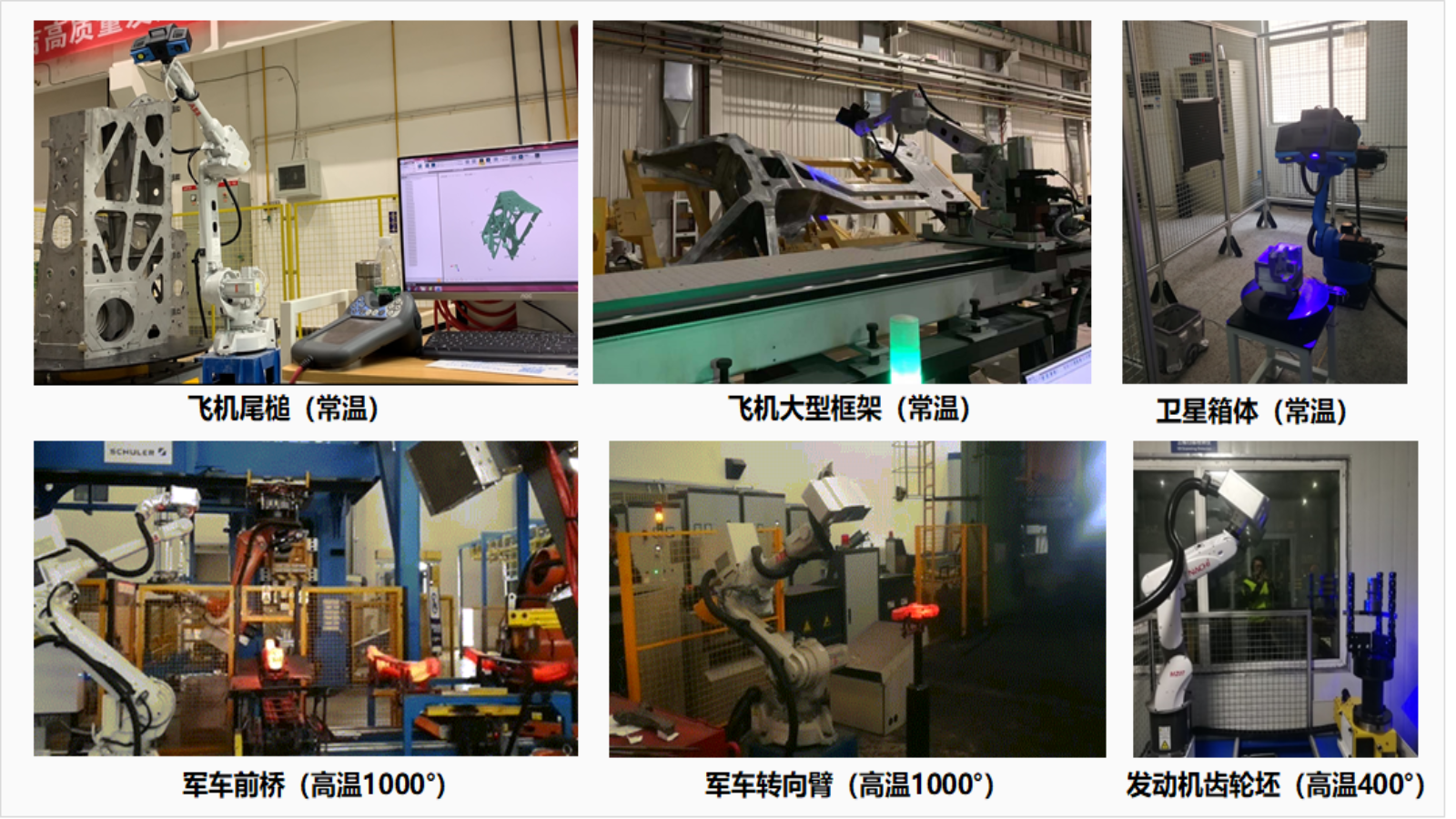
项目团队将面结构光测量和工业机器人相结合,攻克了高精度三维测量、测量路径自动规划、数据自动处理等关键技术,研制了系列自动化在线三维测量装备,国际首次在线实现了1100℃热模锻件三维尺寸的全测全检。广泛应用于国内规模最大的前桥、转向节、曲轴、齿轮等汽车关键锻件生产企业,提升了企业的技术水平和国际竞争力;还应用于黎明、安大、景航等航空企业,提升了叶片、导热内环等航空锻件的精度,支撑了重要国防装备的自主研制。

本项目提供了一种宽基载重子午线轮胎成型机带束鼓及设计方法,将带束鼓的中间段设计为凸出的曲面结构,带束鼓表面的轮廓线由两段直线段与位于两直线段间的弧形段组成,通过轮胎成型仿真模拟,以帘线伸张率和胎面胶料流动均匀性作为判断标准,优选确定最佳参数。本发明有效控制带束层的帘线伸张率,彻底解决定型时带束层帘线受力不均匀的问题,消除了机内定型过程中宽基轮胎胎肩胶料向胎冠中心流动的异常现象,提高了轮胎综合性能。

一种新型的汽车后视镜便携式全自动全功能检测设备,应用于后视镜加工厂的性能检测。能实现全品牌全功能的自动检测。目前市面上都是简易的较少功能可满足的手动检测盒。能避免检测过程人为因素造成的误检。

(1)发明的磁流变电控减振器/悬置大幅度提升了磁流变液的有效使用率,降低了应用成本;经实验测试标定,执行器响应时间<15ms。 (2)开发的电控减振器在匹配自主开发控制器后,提升了采用被动悬架的某量产车型平顺性20%~40%、操稳性10%~15%。 (3)电控减振器及其系统动态特性测试系统(包括响应时间自标定系统、动态可控力特性评价系统)、非线性控制系统均已完备。

PPMLAB软件的主要设计思想在于将复杂的、繁琐的悬置系统设计分析工作按照常规设计分析流程逐一展开,并在所有关键点、疑点、难点处实时提供说明和帮助,以便工程师快速掌握悬置系统设计分析方法以及软件操作方法,迅速提升公司在悬置系统设计分析开发方面的能力,具备与主机厂、零部件供应商同步正向设计开发、提供系统解决方案的整体能力。

提供面向城市道路、高速公路、城郊道路等开放道路的自动驾驶功能开发集成。安装激光雷达、超声波雷达、毫米波雷达、GPS、摄像头、高精轮速传感器等,安装工控机和主动转向、制动控制器,改装轮毂驱动电机,实现智能电动汽车平台。在城市道路、高速道路、城郊道路等实现自动驾驶功能开发。
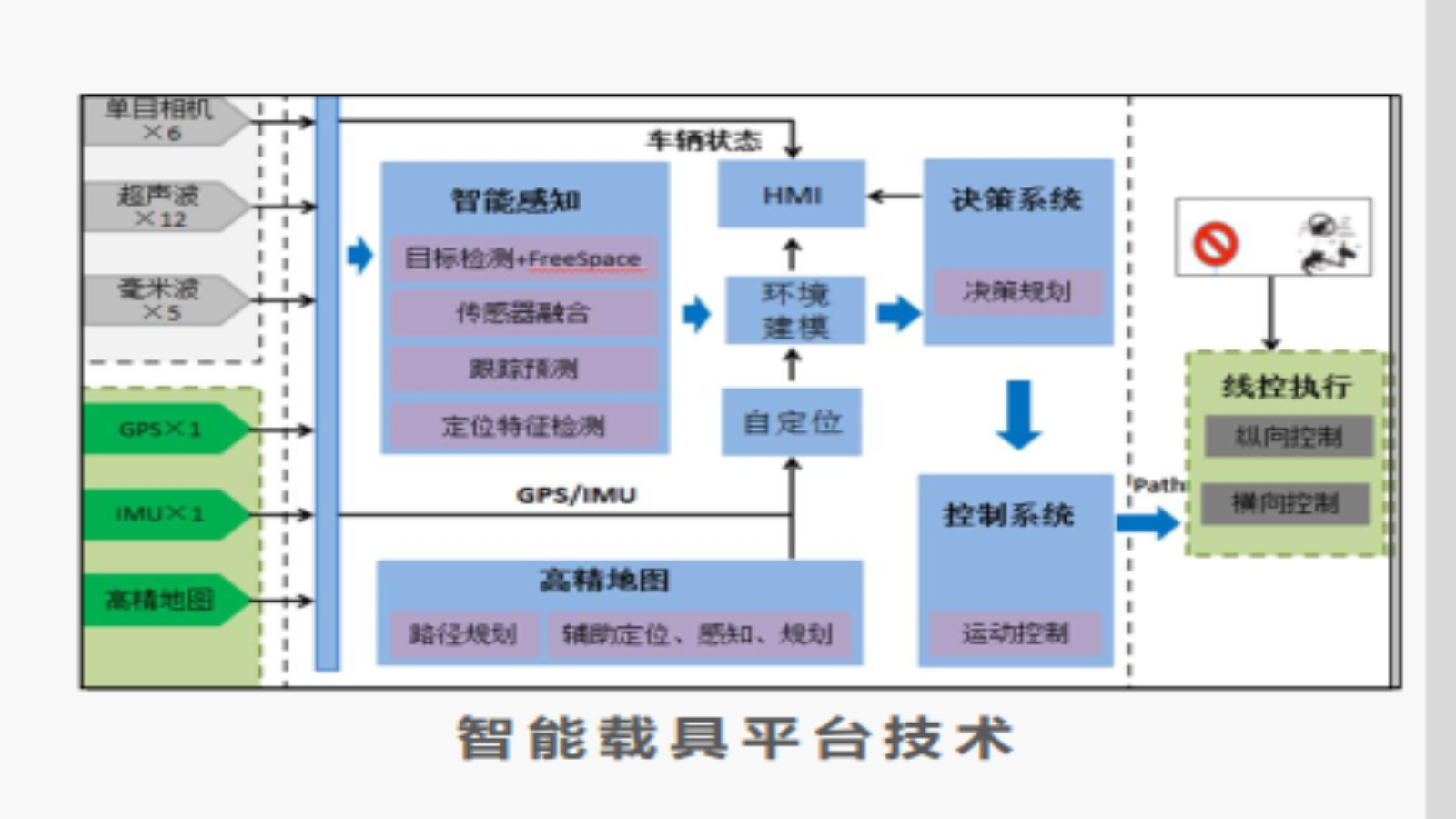
提供面向厂区、机场、 物流园等特定场景的工程车辆自动驾驶功能开发集成。采用单目相机、超声波雷达、毫米波雷达、GPS/IMU作为传感器与高精度地图相结合,实现目标检测、传感器融合、跟踪预测、定位特征检测,实现决策规划与运动控制。在园区无人物流、无人商用客车、景区无人巡逻车和机场无人牵引车上均可应用。

提供基于“虚拟场景+传感器+车辆+计算平台”的定制智能化测试平台产品、技术服务,并支持全工具链的应用与二次开发指导培训。 工控机采集处理与发送各控制信号,转矩传感器采集驾驶员实时转矩信号,转角传感器采集方向盘转角信号,转向管柱在主动转向时带到方向盘转动,制动部件有制动盘和制动钳。 主动制动控制器发送制动指令,外接显示器实时显示试验效果,上位机编写控制程序,主动转向控制器控制转向电机转动,伺服电机模拟回正力矩。 应用于自动驾驶系统功能测试。

电阻点焊是汽车车身制造最核心技术,然而点焊生产面临高节拍、工况多变等挑战,导致焊点合格率降低、质量一致性差,使得车身安全面临巨大风险。研究团队开发面向复杂焊接工况的点焊质量控制技术,提出基于等效能量的焊接热输入自适应控制策略,实现了焊接质量波动快速响应闭环控制,显著减少焊接飞溅、提高焊点质量一致性,弥补了传统方法未考虑工况差异及影响生产节拍的不足,形成了具有自主知识产权的智能点焊自适应控制器装备。
自主开发的车辆液压同步转向控制系统是国内首次实现液压系统同步转向功能,实现工程车辆、重型车辆、农业车辆同步转向功能,可极大地降低车辆操作人员的劳动强度、提高驾驶员的安全性以及方向感,提高操纵稳定性、打破国外的技术封锁,提高国内液压转向车辆同步转向水平,形成自主知识产权的同步转向产品。







