
提供了一种一种无人驾驶汽车通用制动装置及操作方法,本发明不需要改变原车的ABS系统,在制动踏板的位置安装无人驾驶制动系统模拟有人驾驶制动的动作,降低了无人驾驶汽车制动改装的成本,适用于不同车型的汽车,具有一定的通用性。
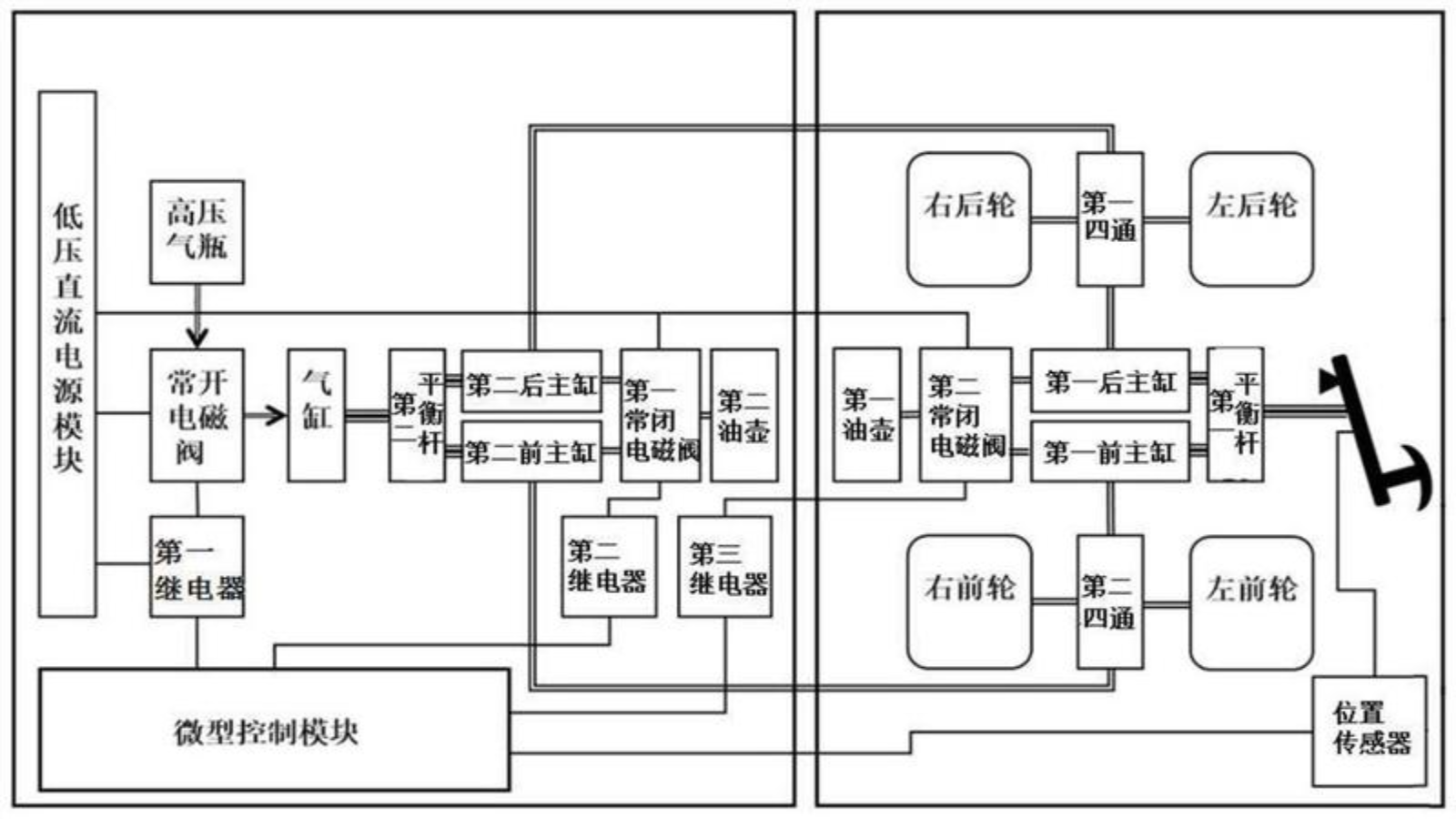
提供了一种基于人机共驾的自动驾驶车辆通用制动系统及制动方法,采用模块化设计,只需将气液耦合线控制动模块和原车制动模块并联,且通用性好,适用于所有自动驾驶车辆的制动系统,结构简单,安装方便。
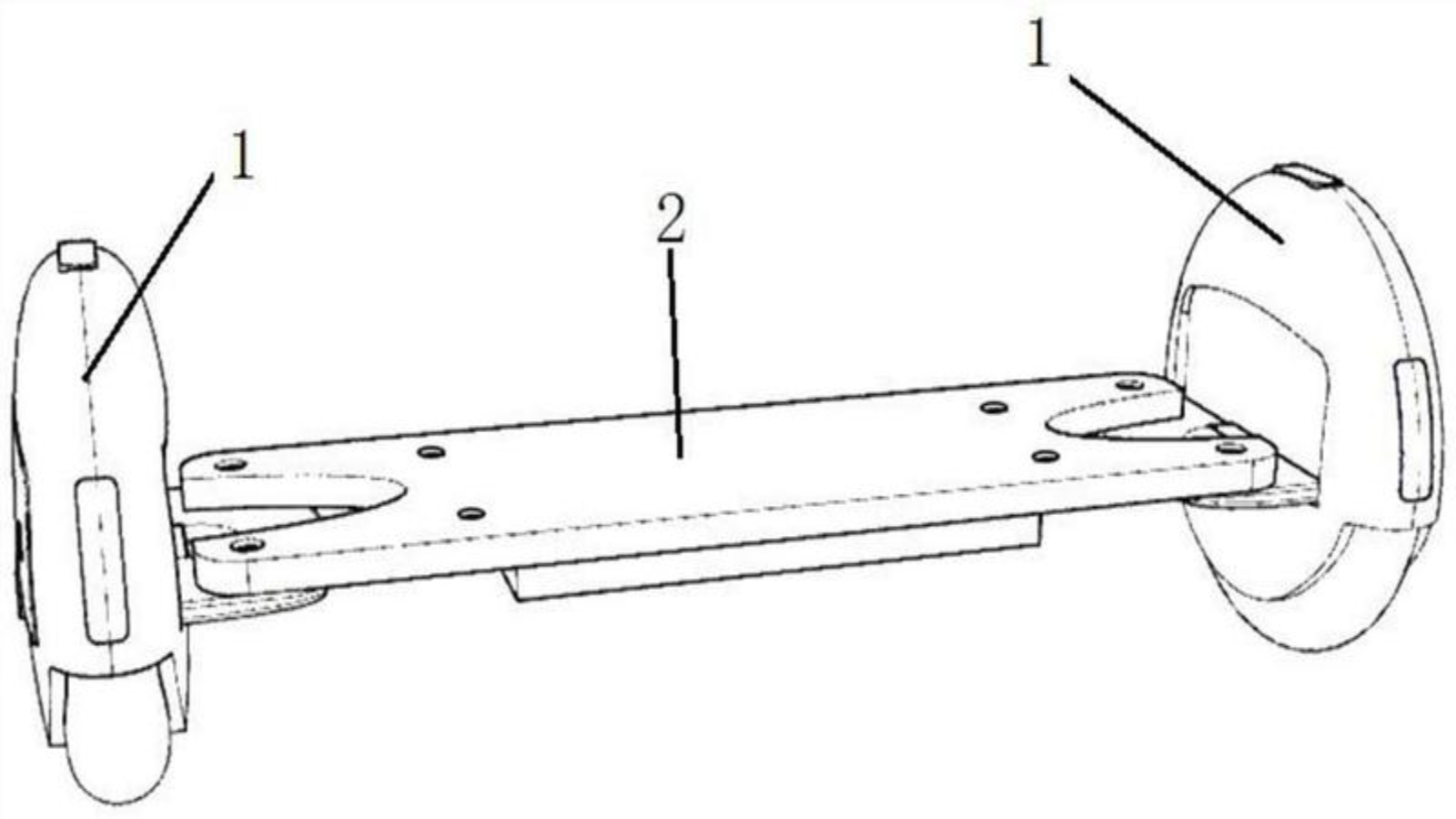
提供了一种基于平衡轮的模块化组合方法,本发明以平衡轮作为基础,运用模块组合增加趣味性的同时节省一定的成本。
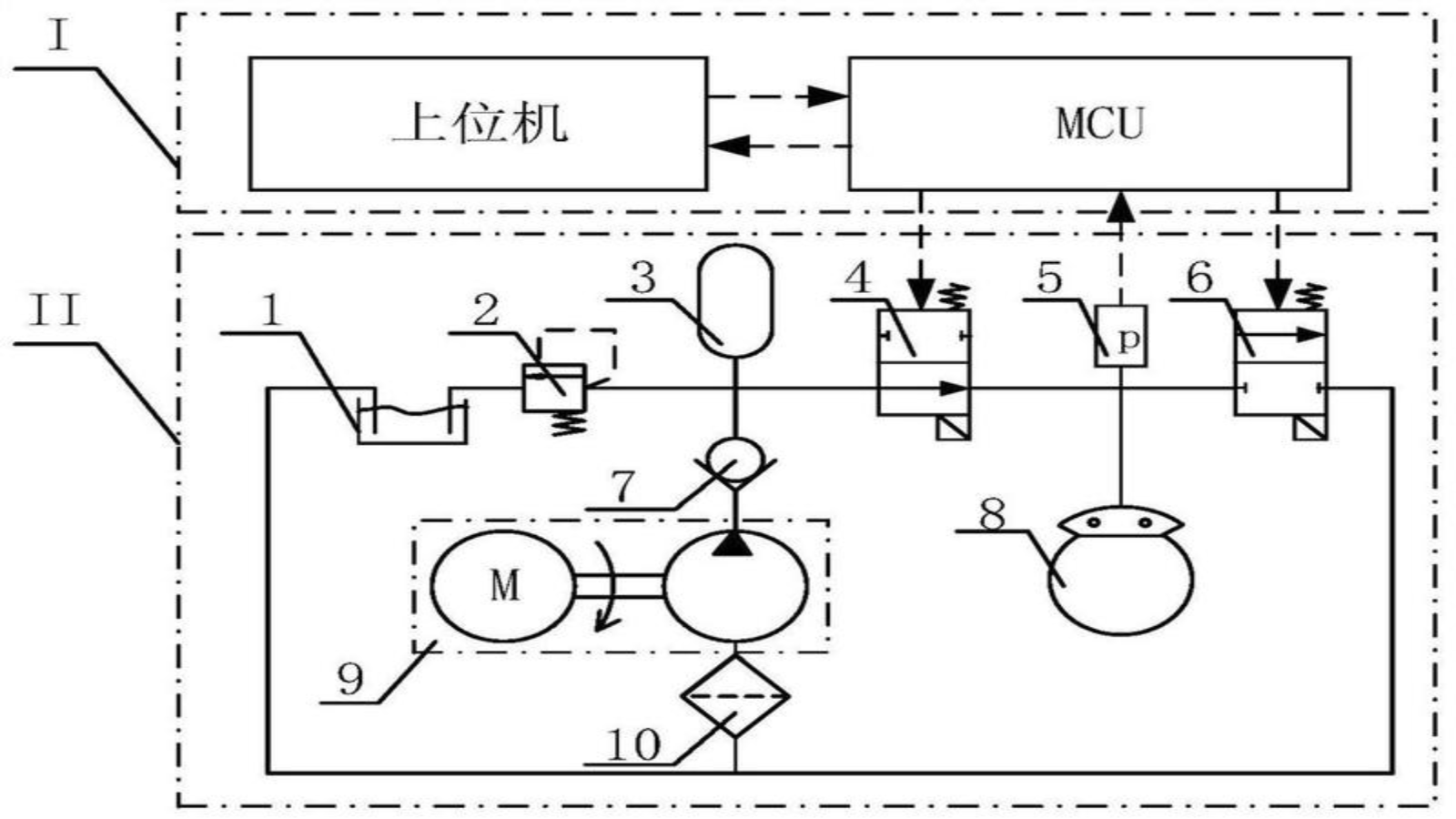
提供了一种无人驾驶车辆通用制动系统及控制方法,本发明不仅可直接用于无人驾驶车辆的生产制造而无需先设计传统车辆刹车系统再进行改装,同时对于改装传统车辆制动系统为自动控制,本发明只需将最终输出油管连接到原车制动油路中,改装极其简单,节省大量改装成本,适用于所有液压制动车辆的改装,通用性好。
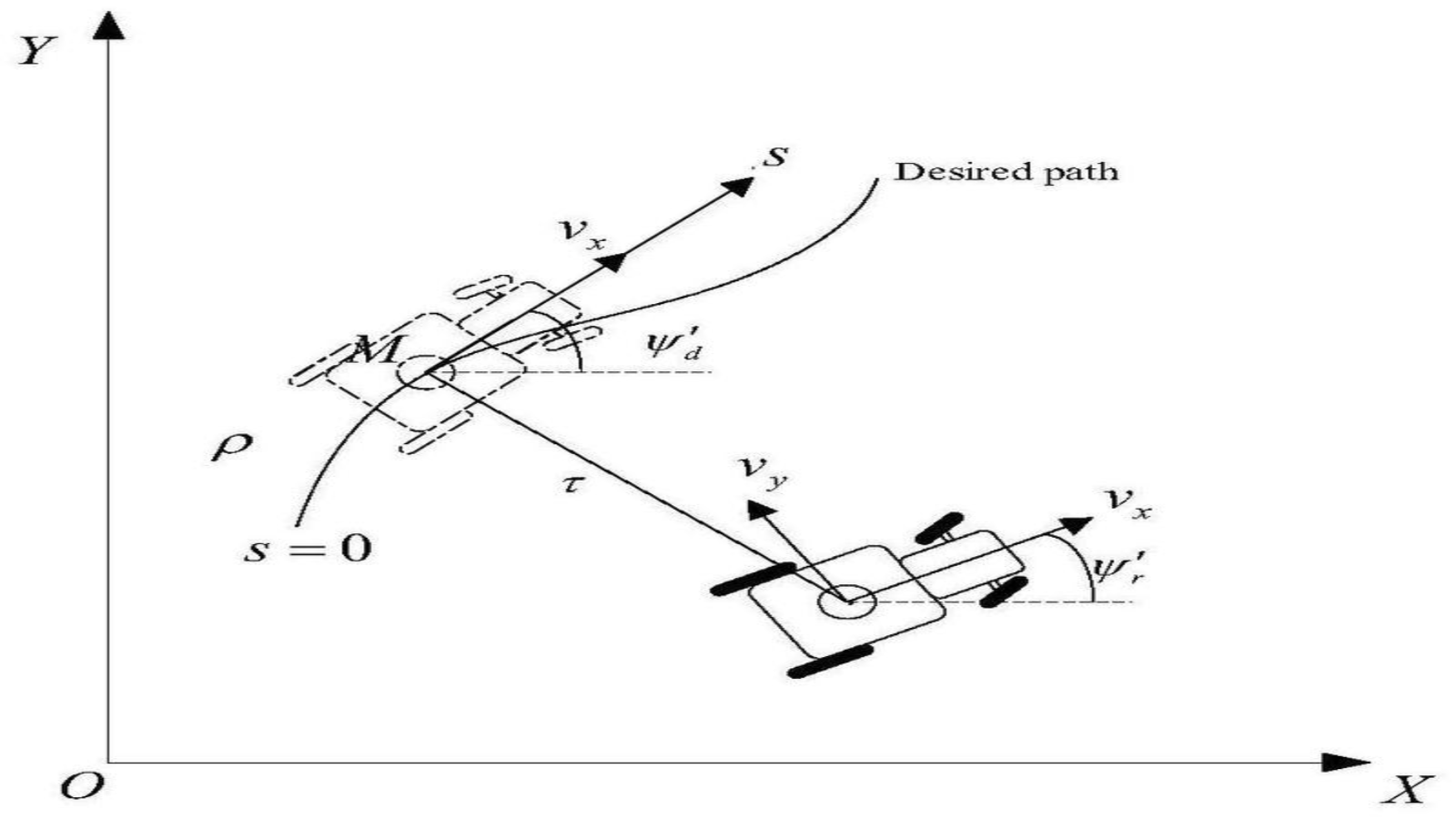
提供了一种一种松软路面智能农机自动驾驶方法,本发明着重考虑轮胎-土壤建模,以获取准确完整的智能农机动力学特性,提高智能农机特殊作业环境下的精确性。
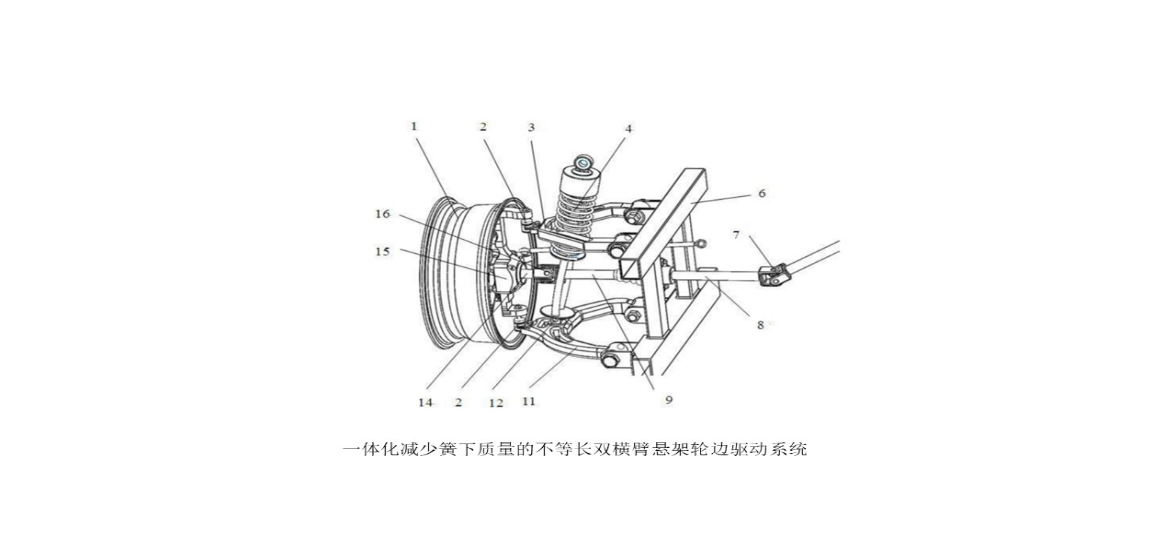
公开了一种一体化减少簧下质量的不等长双横臂悬架轮边驱动系统,包括不等长双横臂悬架、驱动一体化装置、万向节传动轴等。其中驱动一体化装置固定于车架,其包括驱动电机和行星轮减速器,一体化驱动装置与车轮传动轴通过万向节传动轴实现不等高但同轴线的动力传输,可以接受一定程度上在不平路面跳动时引起的一体化驱动装置和车轮轴的错位情况。汽车转向时,可以通过控制电机转速和转向杆来实现驱动系统和转向系统的独立工作。本设计不仅大幅度的减少了簧下质量,提高了车辆的平顺性和稳定性,而且可以利用传统转向方法实现一定角度的转向。
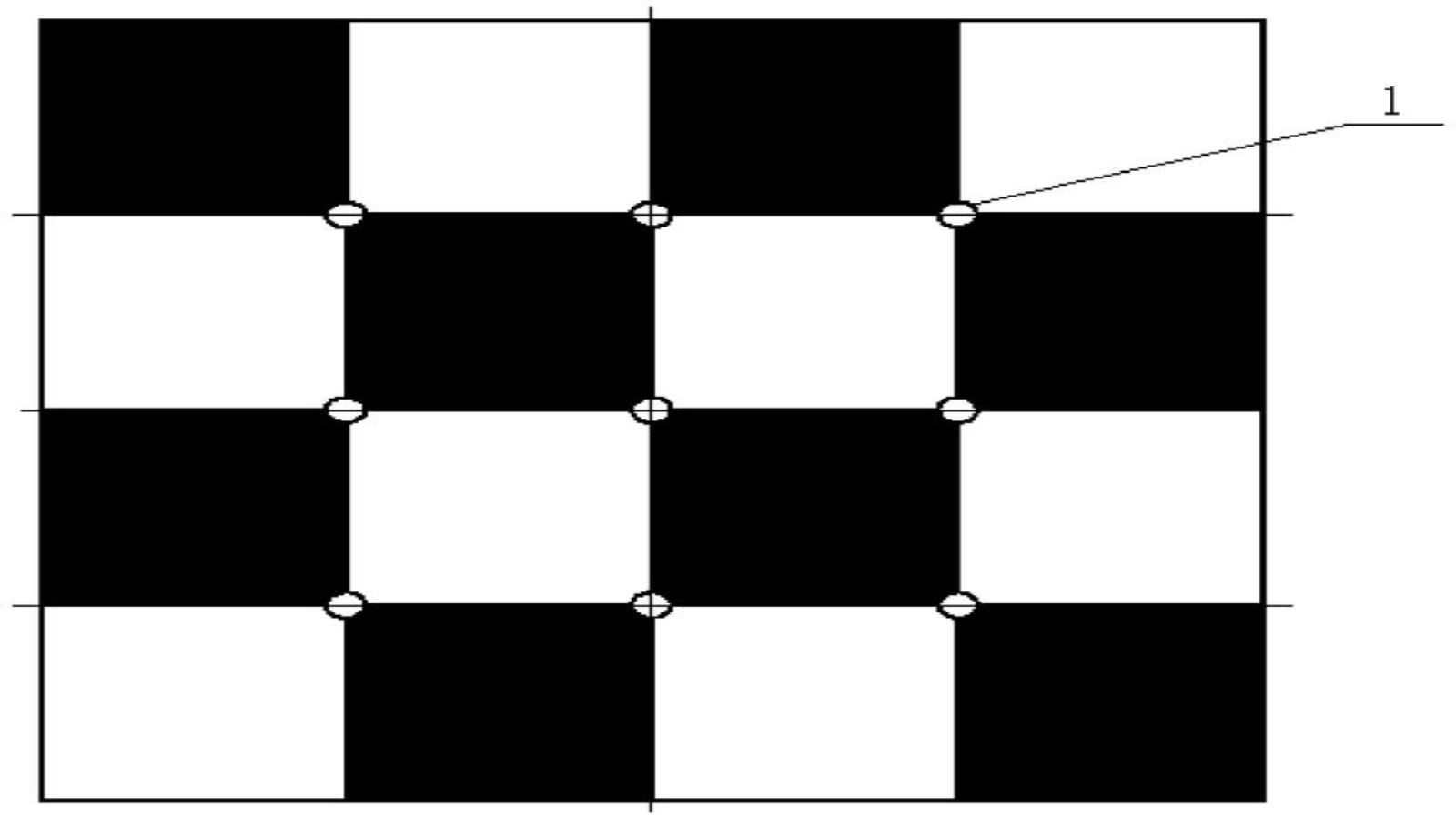
提供了一种工业双目摄像头与红外热成像仪联合标定的装置和方法,以张正友标定板内角点为圆心,开设小孔;在小孔内安装白炽灯泡;在张正友标定板上方安装工业双目摄像头和红外线热成像仪,两者对标定的装置拍摄时视角重合;本发明不仅设计简单、操作简单、成本低廉,能够同时标定两摄像头。
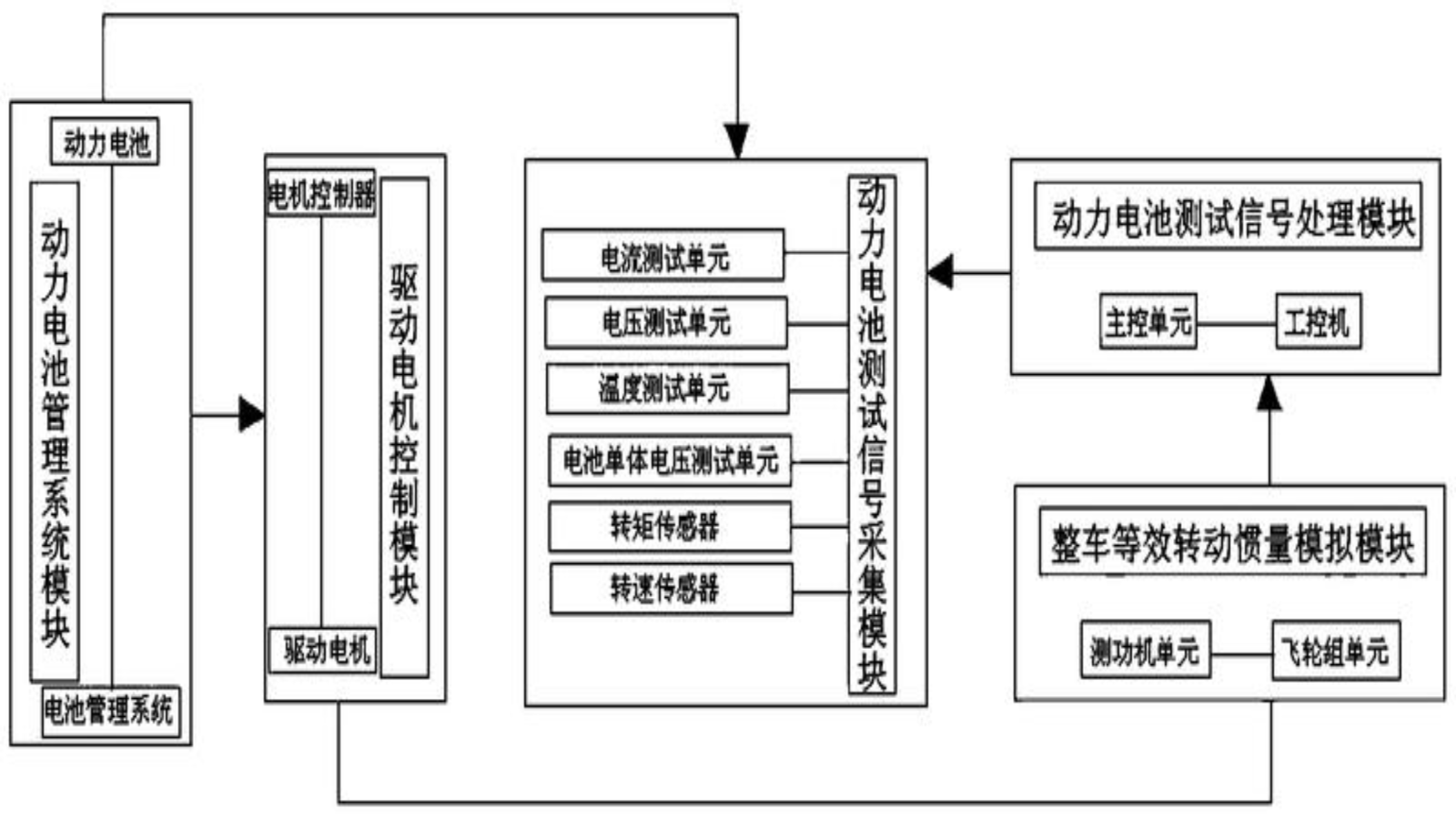
集模块用于采集被测动力电池目标状态量信息、动力电池测试信号处理模块用于处理被测动力电池目标状态量信息、动力电池管理系统模块用于控制被测动力电池输入输出状态、整车等效转动惯量模拟模块用于模拟电动汽车实际工况的以及驱动电机控制模块用于控制驱动电机运行状态;本发明弥补了传统动力测试平台的弊端,能够分别完成被测电动机或者动力电池的动态性能以及静态性能。
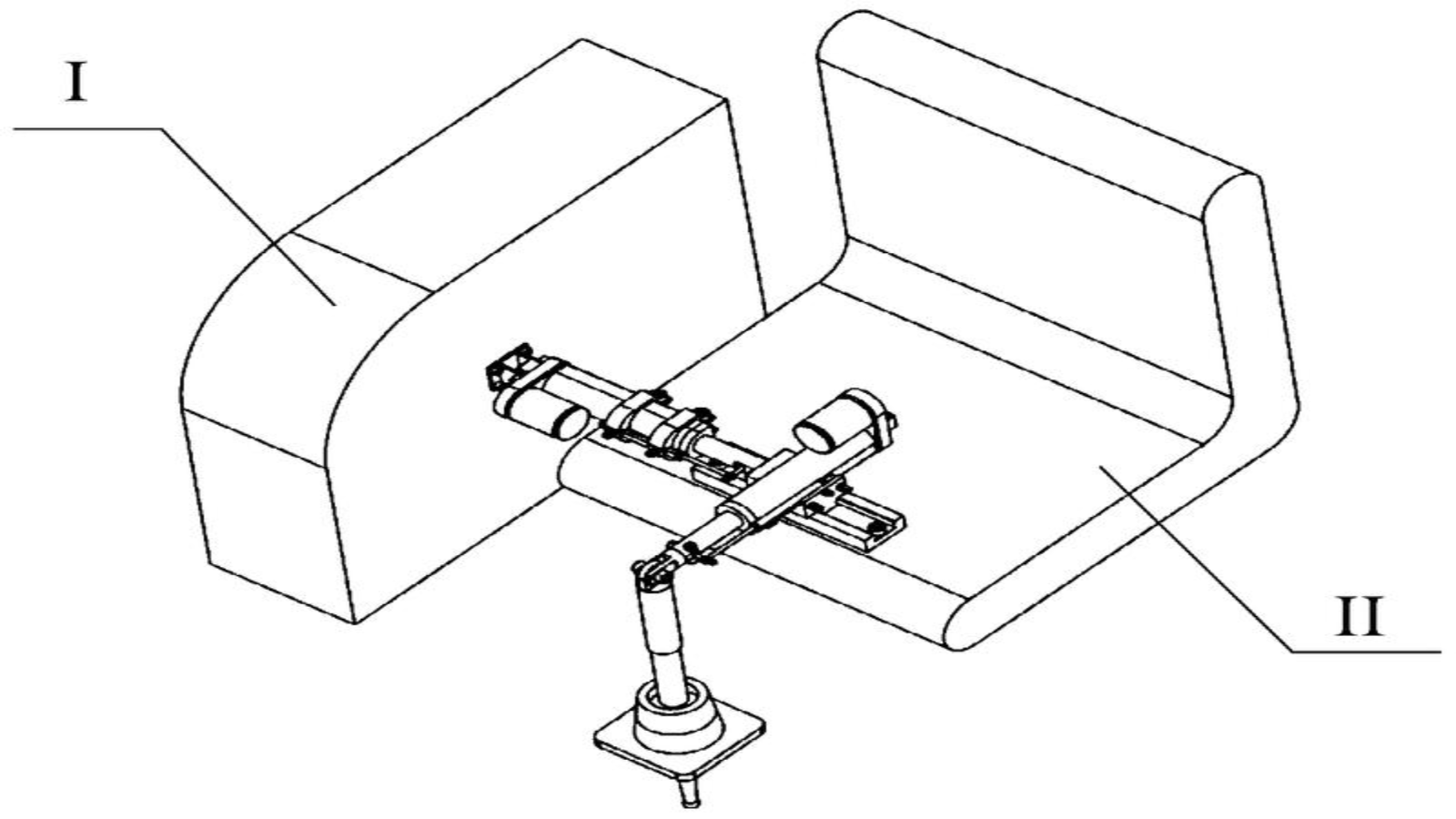
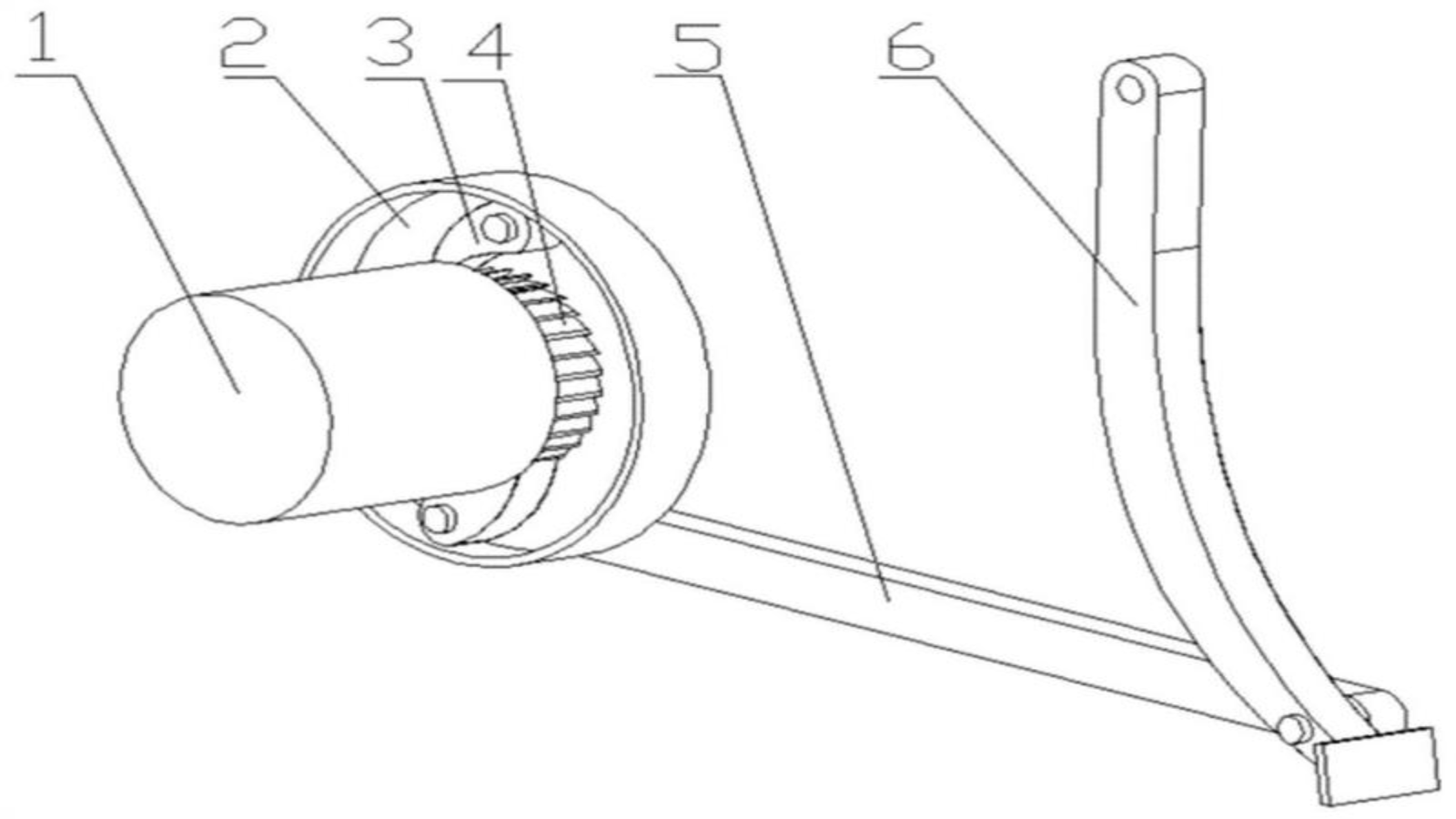
本发明涉及一种可精确控制的无人驾驶拖拉机自动换挡通用装置,包括横向和纵向驱动装置,横向驱动装置的另一端通过滑块可移动连接在导轨上,纵向驱动装置的另一端通过旋转接头与换挡套筒铰接,换挡套筒可移动套设在档杆上;本发明不需要改变原车的换挡结构,只需在原换挡结构上加装附属设备,提高了改装效率,降低了加工成本,适用于不同型号的拖拉机,具有一定的通用性。
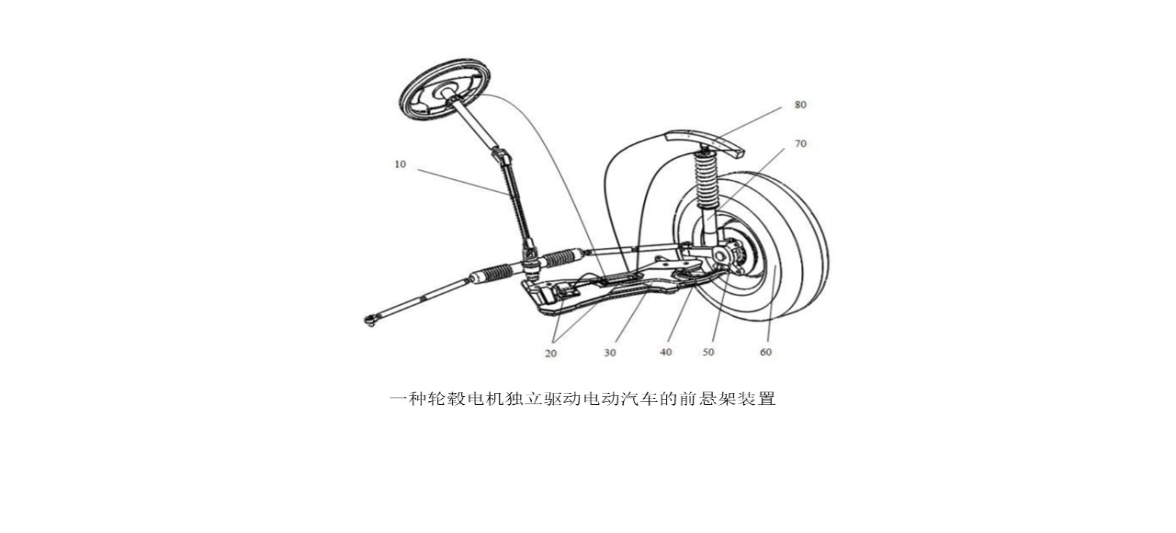
公开了一种轮毂电机独立驱动电动汽车的前悬架装置,包括转向系统总成、液压调节装置、副车架总成、下摆臂、转向节、车轮系统总成、减震器总成和液压缸,转向系统总成与转向节的转向梯形臂相连,副车架总成通过下摆臂与转向节下端相连,转向节上端的支架连接减震器总成,转向节固定在轮毂电机的电机轴上,前悬架装置还包括液压缸和液压调节装置,液压缸缸体固定在电动汽车上,两端各有一个通油口通过油管连接液压调节装置,液压缸内的活塞通过活塞杆和减震器总成固定连接。本发明能够综合根据汽车转速信号和转角信号平顺地自动调节汽车的主销后倾角,
