
传统的双轴车辆,在转向器设计中,使得两侧车轮单独绕主销转动。为了保证车辆转向时两侧车轮均作纯滚动,内转向轮偏转角β大于外转向轮偏转角α,满足理想的关系式:cotα=cotβ+B/L,这里B为两侧主销轴线与地面交点之间的距离,L为前后轴距,理想的关系式也叫阿克曼公式,转向中心到外侧车轮接地点的距离叫转向半径R,转向半径越小则车辆转向时所需场地越小通过性能好。
主要可实现搬运重物上楼梯,并且可用于外太空探索的“月球车”或“火星车”,以及残疾人士轮椅的行驶系中。在没有电梯的楼房中,搬运重物,上楼梯成为一大难事。对于住户,雇人工搬运的花费大大超过搬运普通货物。普通人工搬抬,需要大量时间、花费力气,对搬运工身体素质要求很高,且会对他们对的身体造成伤害。若采用起重机吊运,又因钢琴体积较大,需要较大的窗户才能进入室内。现有技术没能解决上楼梯时重物质心会沿着楼梯坡面上下不住大幅度起伏的问题。另外,在外太空探索中,例如登陆月球与火星,常常要制造“月球车”或“火星车”。因这些星球上的地形复杂,崎岖不平,如何获得较好的通过性,也成为困扰科研工作者们的难题。再则,对一些行动不便的残疾人士,发明一种可上楼梯的轮椅,也是很迫切的现实需要。本发明的应用就可以较好地解决以上问题。

电池生产、服役和再利用是电池全生命周期重要环节,与电池电极过程特性紧密相关的阻抗在相应环节都发挥了重要的作用。使用专用的电化学工作站设备进行阻抗测量是实验室常用做法。然而,对于现场应用、在线应用来说,该做法具有测量速度慢、使用成本高、操作复杂、系统兼容差的问题,从而限制了阻抗在电池健康状态估计、老化模式分析以及析锂、过充、过放、温度异常等故障诊断等应用开展。针对该难题,发明了在充放电动态工况下进行被动式以及在充电、静置等稳态工况下进行主动式宽频阻抗快速计算技术,并针对不用应用场景发明了相应的阻抗测量系统,为在全生命应用场景中开展高效、智能的电池管控奠定了基础。
随着汽车技术的不断发展,智能座舱的相关技术不断落定应用,主动交互是未来座舱交互的重要趋势之一,需要根据不同的消费者达到千人千面的自适应调整,符合驾乘的舒适性。软件测评中心基于独家的人体驾乘姿态数据,运用机器学习算法进行模型封装,通过输入驾驶员的属性(身高、体重、性别)和车的属性(H30、L51等),能够输出驾驶员乘坐的位置,通过T-BOX驱动座椅、方向盘等进行自适应调节,保证驾乘的舒适性。
线控转向是自动驾驶汽车实现自主转向、路径跟踪与避障避险的关键技术,其性能直接影响主动安全与驾乘体验,是实现高级自动驾驶的基石之一。线控转向冗余设计,是指保证自动驾驶汽车出现电子元件失效或控制系统环境恶化等线控转向系统失效时,系统仍能提供转向等主要功能,保证驾驶员接管后或自主驾驶时自动驾驶汽车仍能以安全的方式运行。
本单位研发的线控冗余转向控制器面向L3及以上自动驾驶汽车,基于双控制器系统冗余架构,具备基本助力、主动转向、横向协调、失效安全、控制权转移等线控转向功能的同时,实现了硬件、通讯、电源等系统的冗余设计,满足功能安全ASIL D等级要求。本单位研发的线控冗余转向控制器是在原有无刷电机EPS产业化基础上进行的深度研发,目前已有控制器样品。
本单位依托清华大学苏州汽车研究院平台,构建了高校研究成果向产业转化、落地、应用的平台,自主掌握转向控制系统核心技术,可为零部件供应商、主机厂等提供线控冗余转向控制系统包括控制器系统架构、应用层软件算法、仿真与测试、底层软件开发、控制器硬件设计等在内的技术开发服务。
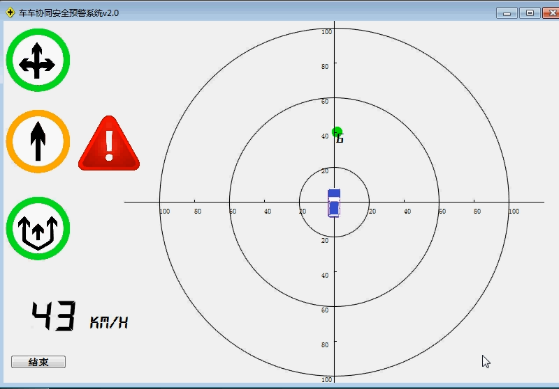
当前主流的车载自适应巡航系统对使用场景有一定要求,大多无法满足低速工况如城市拥堵路段的自动跟驰需求。此外,系统相关控制参数一般默认不变,缺少针对不同驾驶人不同驾驶风格的差异化策略。针对上述问题,基于车辆信息感知与控制技术,充分考虑驾驶人在跟驰行为中的主观危险感及驾驶风格的异质性,实现了自适应驾驶人特征的全速自适应巡航系统技术。首先基于自然驾驶跟驰数据, 考虑驾驶人在跟驰行为中的主观危险感及驾驶风格的异质性,对驾驶人跟驰行为进行了建模;其次在车辆纵向线控改装的基础上,以上述驾驶人跟驰模型为核心算法,实现了实车全速自适应巡航,满足拥堵、启停等工况使用需求;最后实现驾驶人跟驰特征的在线辨识与更新,并将相关参数应用于车辆自适应巡航控制,使系统具有适应不同驾驶人跟驰行为习惯的特性,提高驾驶人的舒适感和适应性。
围绕汽车仪表及电控单元形成一批专利技术:“基于萤火虫算法优化BP神经网络的最佳滑移率识别方法”和“汽车组合仪表测试系统V1.0.1”“商用车磁电式轮速传感器检测系统V1.0.1”“商用车霍尔式轮速传感器检测系统V1.0”“商用车仪表生产管理系统V1.0.1”等软件著作权,开发一种高可靠性的通用化智能仪表平台。
围绕汽车转向节开发过程中的检测难题,研发的“一种润滑油油品检测装置”、“一种锻件温度监测装置以及锻造生产辅助系统”专利技术和 “汽车转向节缺陷管理系统V1.0”、“复杂环境下锻件身份识别系统V1.0.1,实现了转向节生产过程中的节能降耗、质量提升,减少了环境污染!
针对圆形隧道内壁清理等作业需求,传统轮式和履带行走机构难以满足要求。设计了一种角度可调的履带行走机构,能够适应不同直径的隧道清扫作业。

高级车辆事故自动呼救系统(Advanced Automatic Crash Notification System, AACNS),在车辆发生严重交通事故、车内乘员无法自主呼救的情况下,能够由系统中的事故监测模块完成事故判断后自动触发呼救模块,对外发出求救信息,同时还能提供车内乘员伤情的初步评估,从而能够极大的提高救援和治疗的效率。现有一些车载AACNS存在的主要问题有:(1)将安全气囊点火信号作为触发信号源,即系统中的事故监测模块一旦检测到安全气囊发生点火,就自动触发呼救模块。但是,以安全气囊触发的AACNS存在可靠性受到安全气囊系统的制约、后期加装困难等问题。(2)采用的是高度中心化的预测模式,即伤情预测只能由汽车企业的服务中心依据伤情预测算法来进行,整个过程需要驾驶员和服务中心人员进行交互,可能导致伤情误判或者呼救延误。
本项目所研发的AACNS采集车身加速度数据,利用事故检测算法判断严重事故是否发生,进而触动呼救模块进行呼救。同时能够根据车载传感器的数据预测伤情,从而最大限度地减少人为失误,提高呼救效率。