
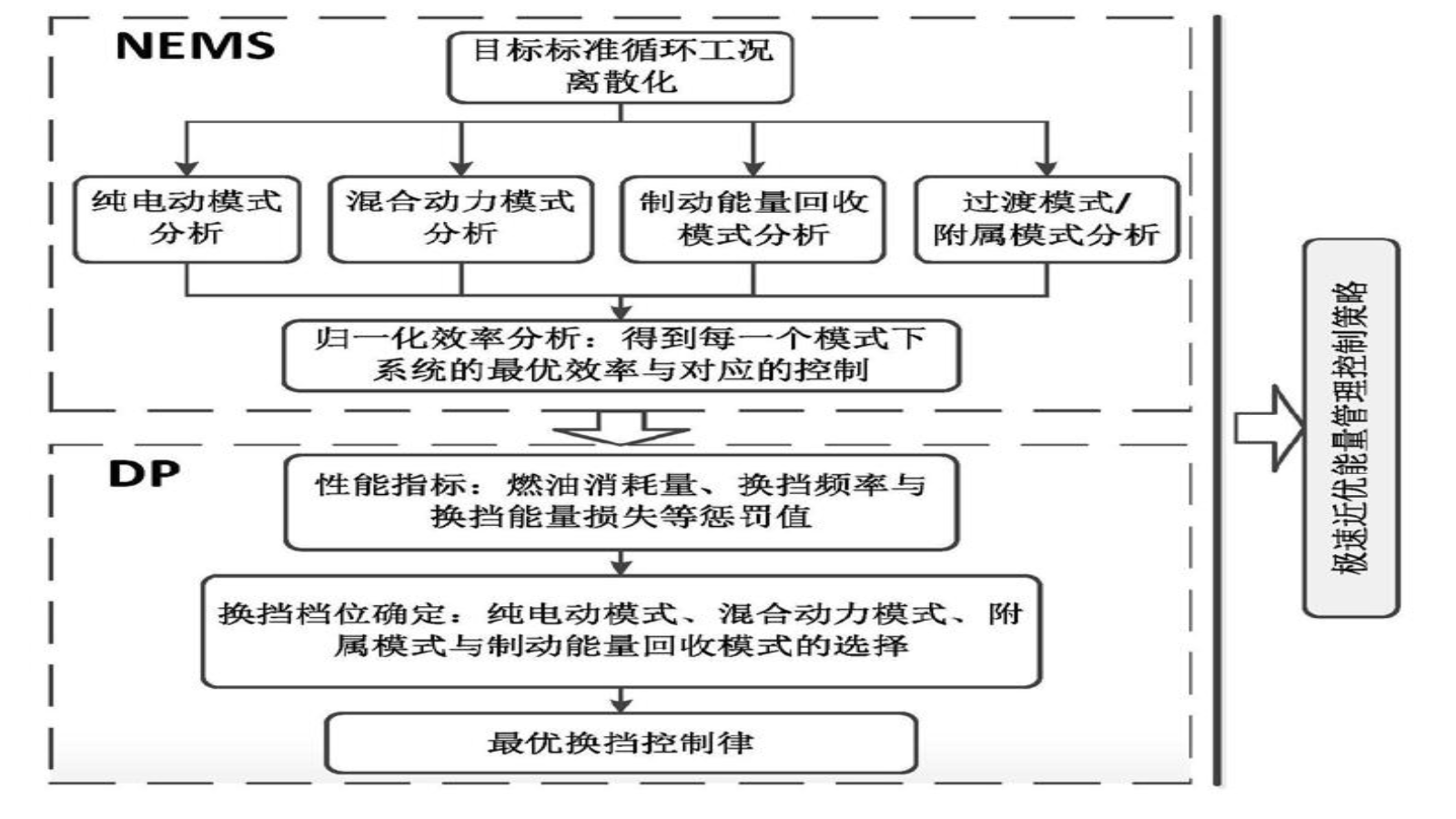
一种基于能量效率最大化的多模混合动力汽车能量管理控制策略,共分两层,内层是效率归一化最大化策略,用于计算最优的能量分配律,能够同时处理混合动力模式与纯电动模式的能量效率优化问题;外层是动态规划,用于处理多模混合动力汽车的模式切换问题,求解最优模式切换命令,能够在避免频繁换挡与换挡能量损失前提下,做出最优模式切换控制命令。外层与内层相互协调,最终形成适用于多模混合动力汽车的近优能量管理控制策略。

本发明提出一种考虑道路坡度的电动汽车速度瞬时优化的方法,通过将车辆动能转化为等效能量消耗,使总能量消耗瞬间最小化,从而优化牵引力或制动力矩。此外,还设计了一种速度相关因子来调节给定巡航速度范围内的车速,克服了传统速度优化方法要提前获取未来道路信息的弊端,同时该方法具有极短的运算时间,因此具有极强的实车应用前景。

本发明提出了一种基于道路坡度的能量归一最小化的混合动力汽车优化方法,包括以下步骤:初始道路信息获取;初始参数设定;燃油等效因子计算;燃油等效消耗率计算;速度转化因子计算;能量归一最小化计算。本发明在满足车辆动力性和考虑道路实际状况的前提条件下,采用一种基于道路坡度的能量归一最小化的混合动力汽车优化方法,保证了能量消耗的最优化,同时保证了蓄电池的电量平衡,进而确保了蓄电池的性能和寿命。
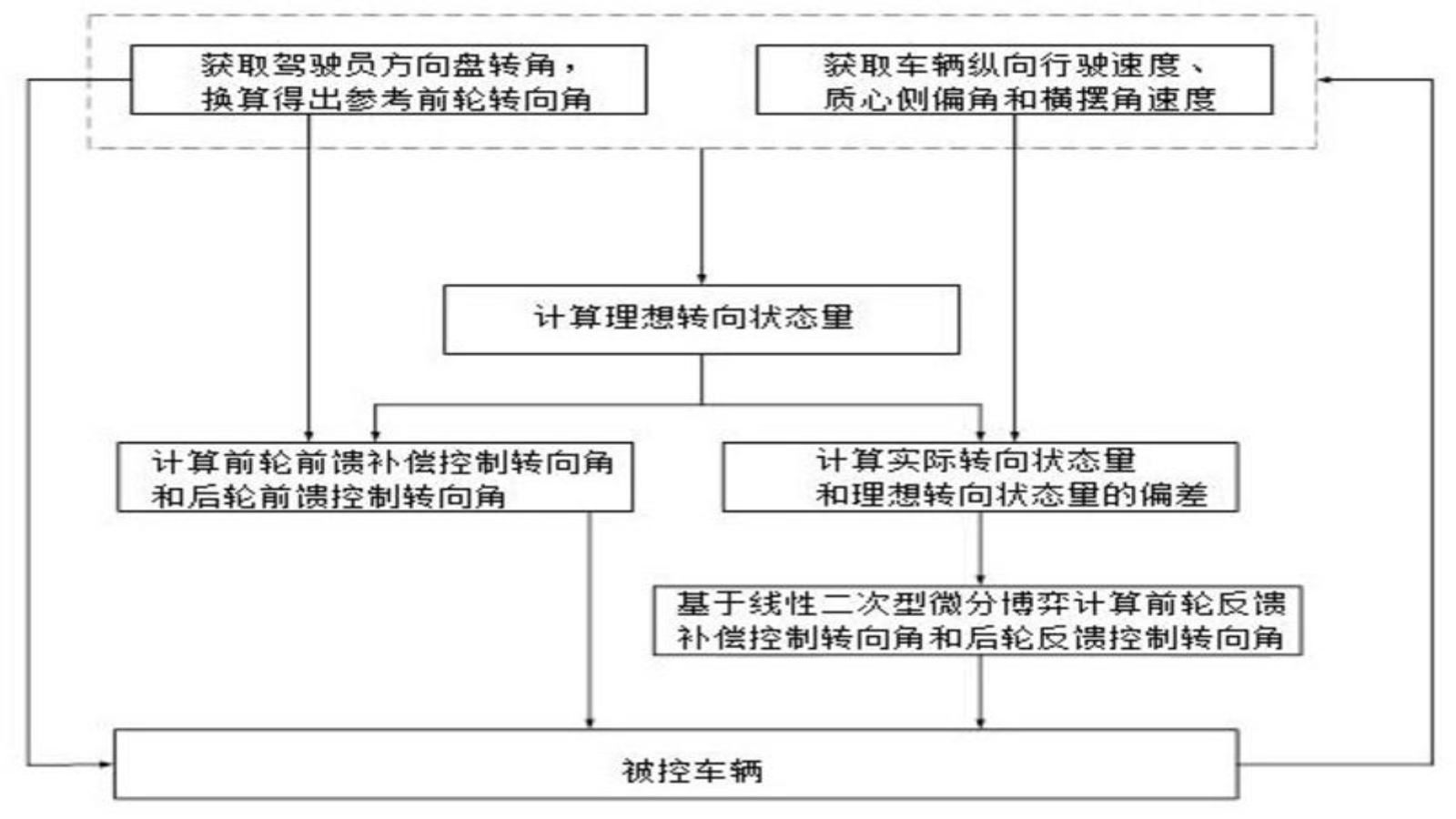
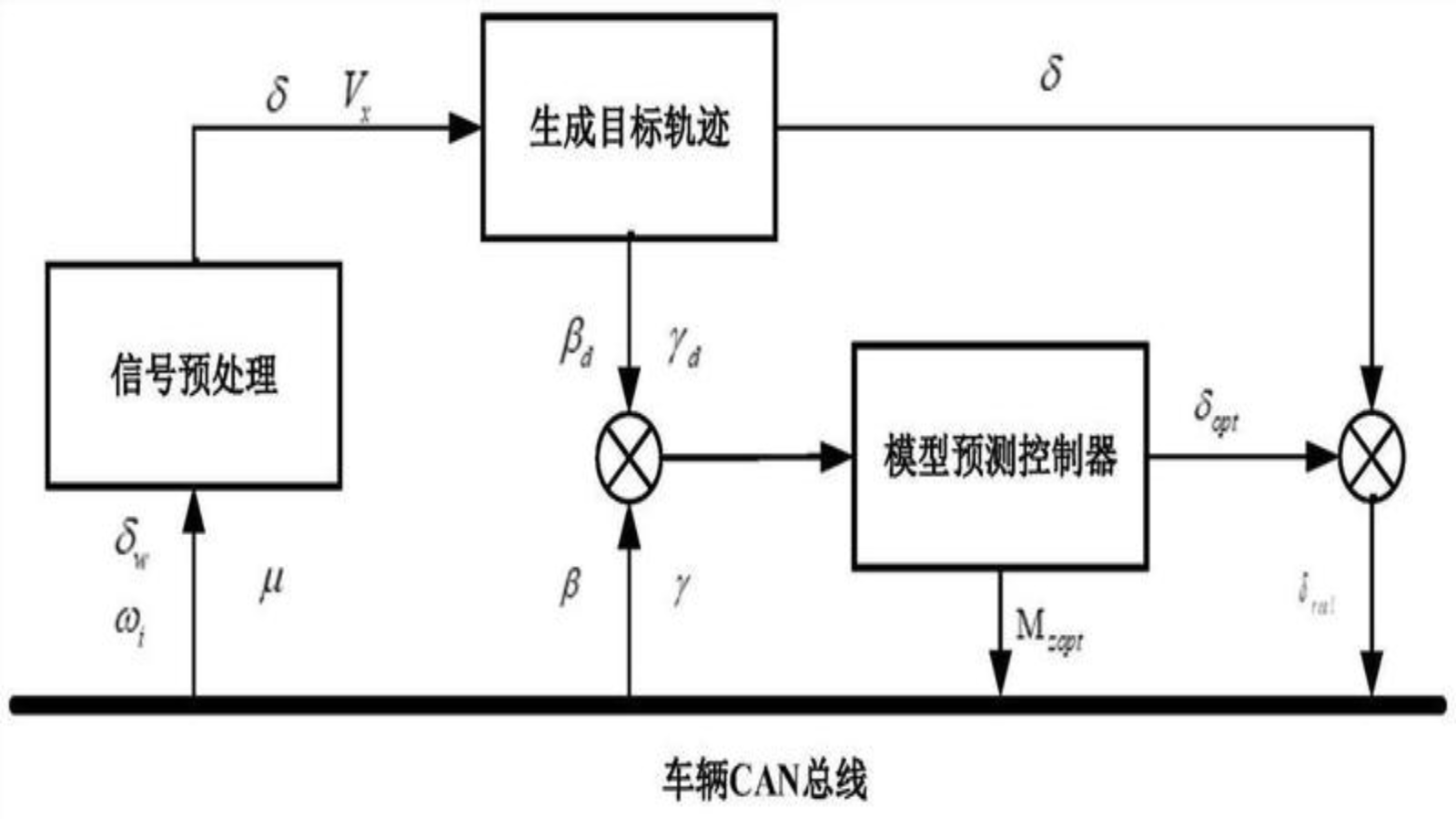
提供了一种基于线性二次型微分博弈的四轮独立驱动电动汽车四轮主动转向控制方法,通过前馈与反馈控制相结合的四轮主动转向提高电动汽车高速转向时的操纵稳定性和低速转向时的操纵灵活性,有效地降低了汽车质心侧偏角,能够较好地跟踪车辆理想横摆角速度,改善了车辆的主动安全性能。
提供了一种一种极限工况下的四轮独立驱动电动汽车牵引力控制方法,采用三种不同的驱动模式取代了单一的转矩分配方式,方便了驾驶员在极限工况对车辆的操纵,提高了车辆的主动安全性。
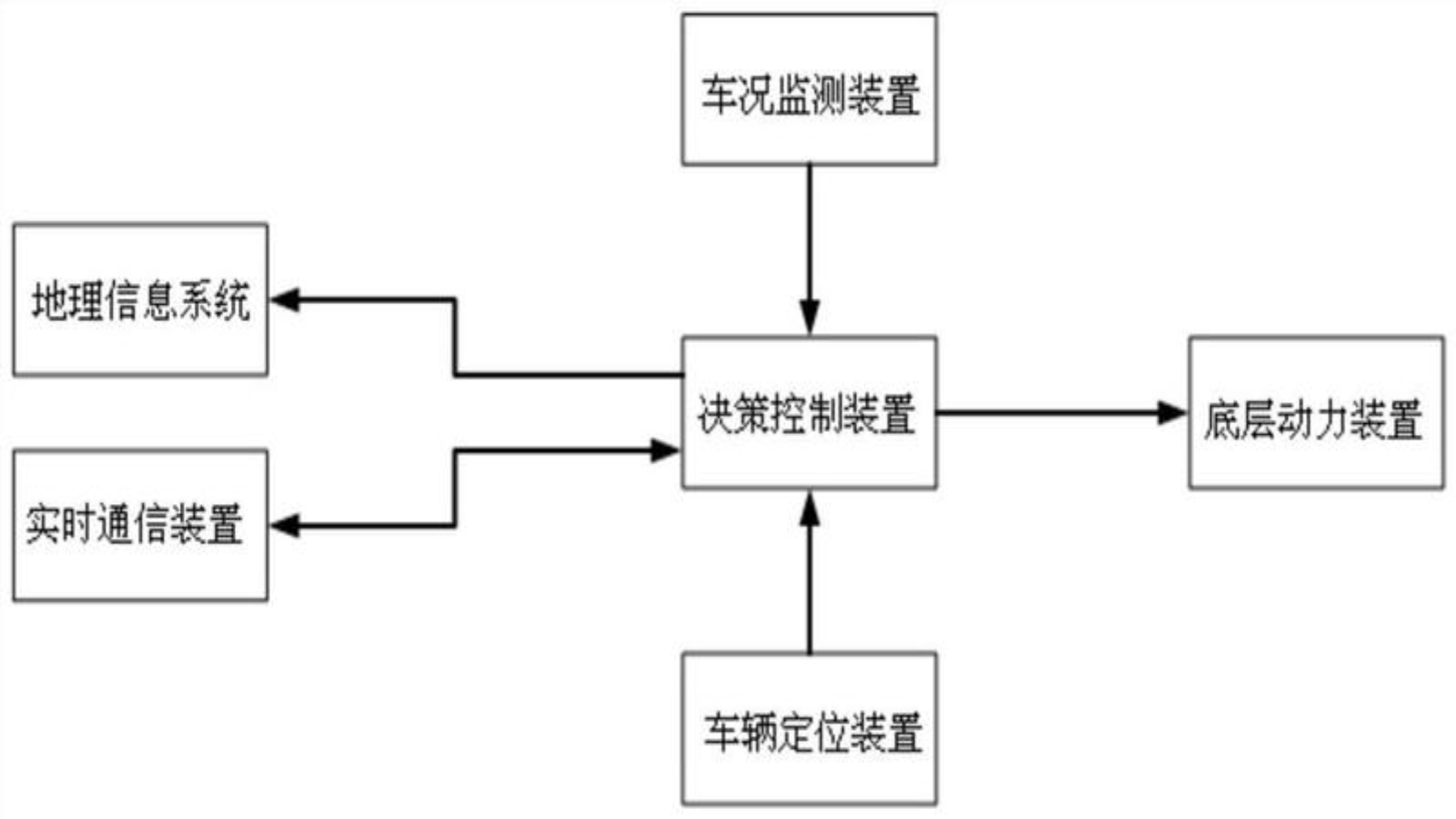
提供了一种基于动态规划算法的电动汽车能量管理和行驶方法,包括轮毂电机测功、求出道路坡度信息、获取自身状态以及前车的状态和最优的分配力矩和行驶方法,为其他用于能量管理的控制算法的控制效果提供对比的基准,具有广阔的应用前景。
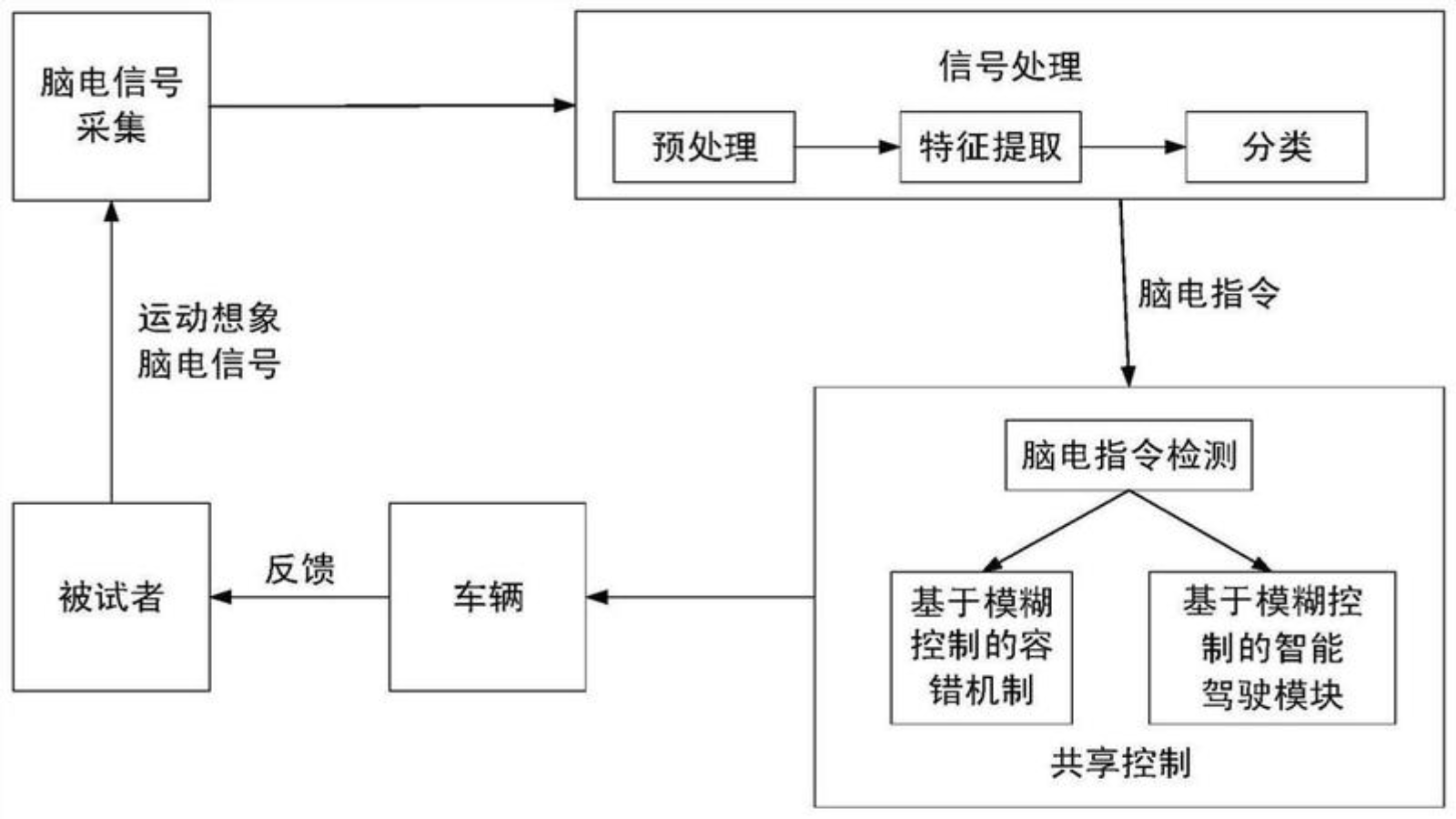
提供了一种基于模糊控制的脑控车辆共享控制方法,有两种机制,分别为基于模糊控制的容错机制和基于模糊控制的智能驾驶机制,弥补了脑机接口识别错误率高、实时性差、命令数受限等问题,大大提高了脑控车辆在未知环境下的安全性。
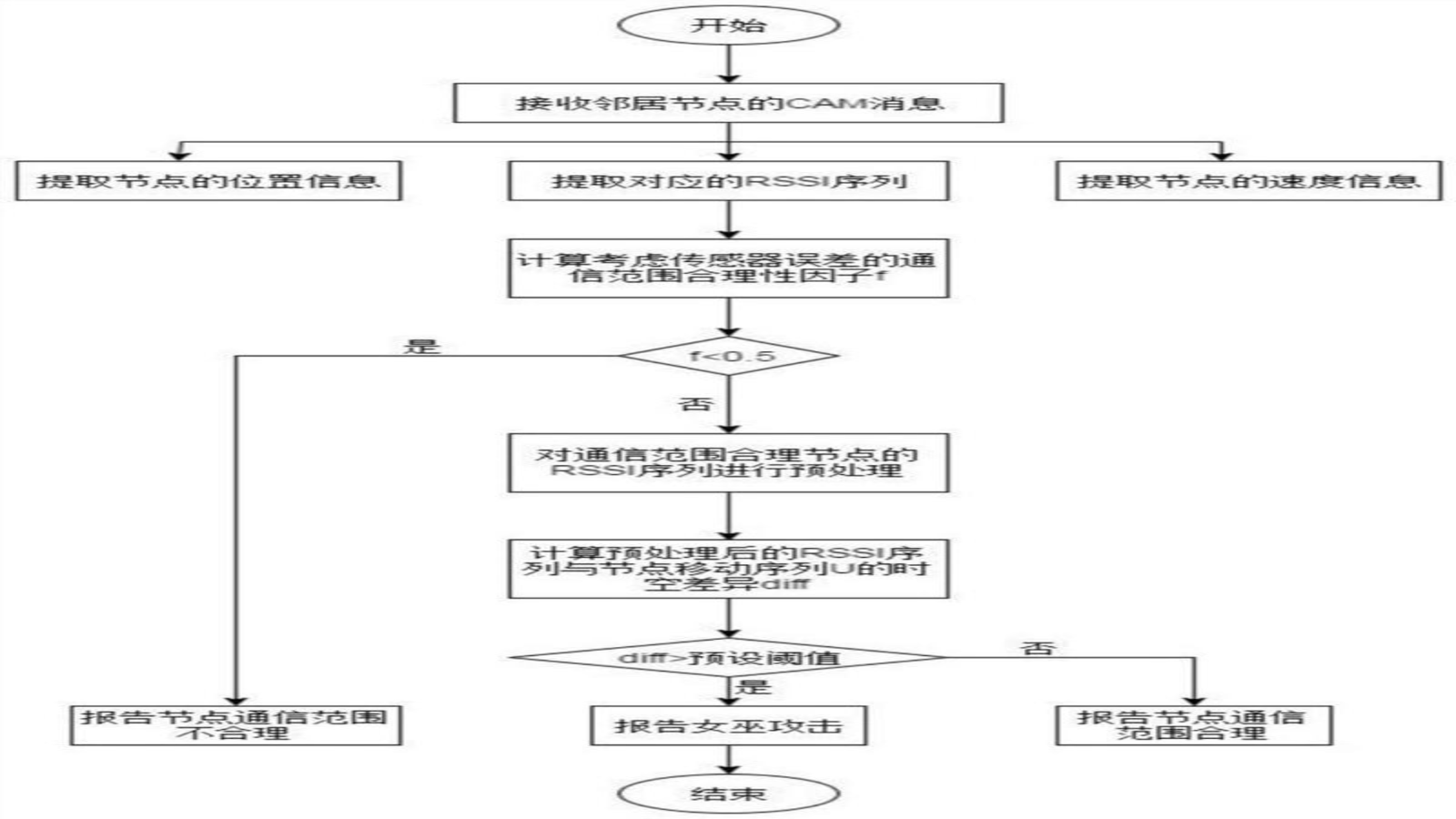
提供了一种考虑传感器误差的女巫攻击节点的检测方法及装置,涉及车载网络安全技术领域,解决了车载网络对女巫攻击节点检测不够精准的技术问题。

提供了一种基于机器学习实现脑控智能小车的构建方法,实现了小车的实时控制,本发明所需的硬件平台结构简单成本低,通过各通道频率选取及部分维度信号分量的剔除提高了脑电信号的识别率,保障了小车的驾驶安全。
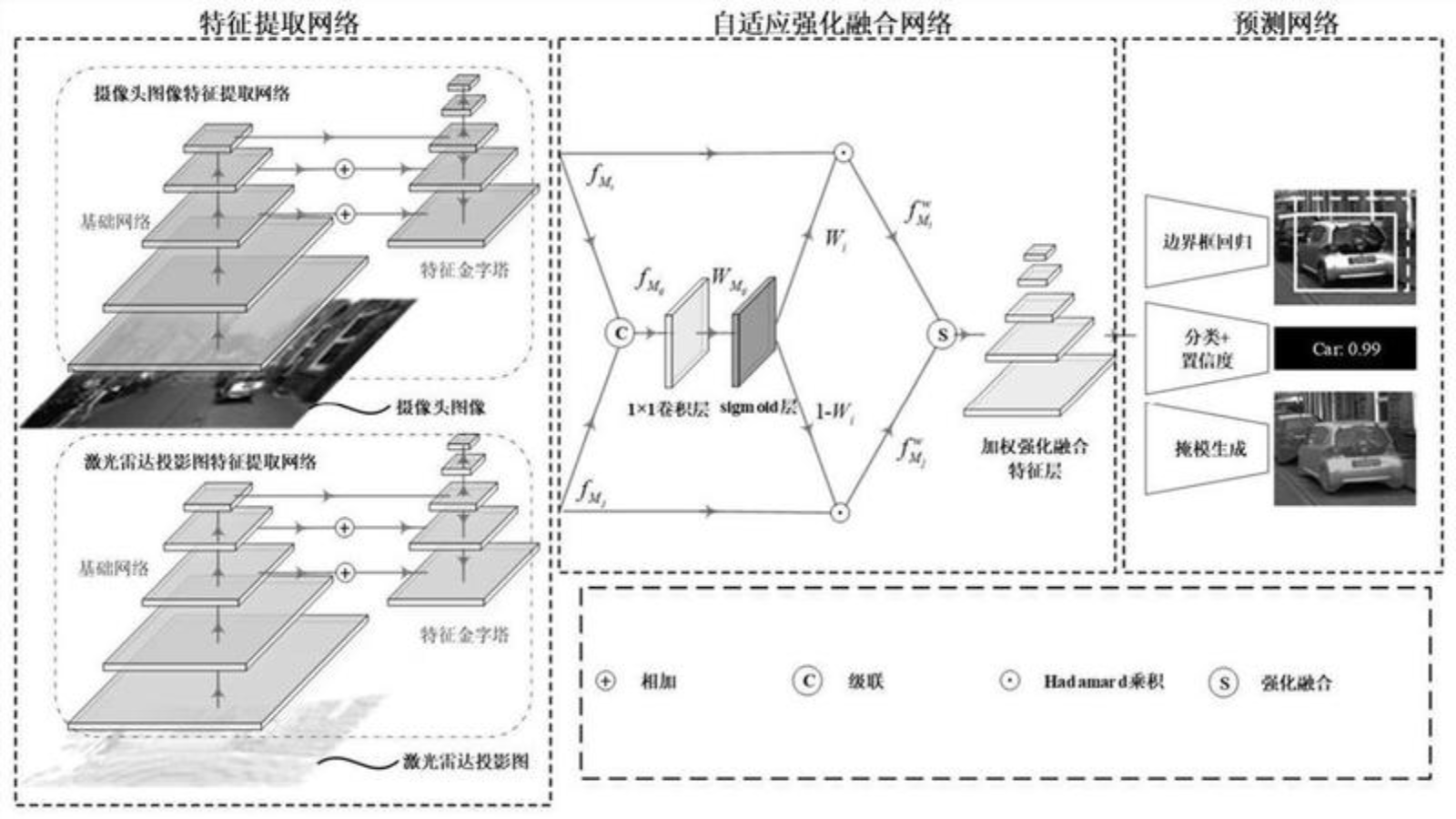
提供了一种基于摄像头和激光雷达的自适应强化融合实时实例分割方法,将摄像头图像和激光雷达投影图的图像特征进行融合,根据所述融合后的图像特征,利用实时实例分割网络输出目标的类别、置信度、边界框、掩模,获取目标的实例分割结果。本发明能够在复杂环境下实时、精确且鲁棒地实现目标实例分割,在智能网联车辆感知领域具有广泛的应用前景。

