
面向自动驾驶汽车预期功能安全问题所导致的交通事故频发及事故责任难以衡量的行业难题,建立了交通法规形式化表达模型与多维度安全责任模型,构建了面向众多车企、具有普适性、满足交通法规基本要求的智能驾驶安全监测系统。作为与智能驾驶并行且起规约作用的第三方独立安全监控方法,可以实时验证自动驾驶决策是否符合显性安全与隐形安全交通规则,并在危险态势下提供保障安全底线的后备安全轨迹。
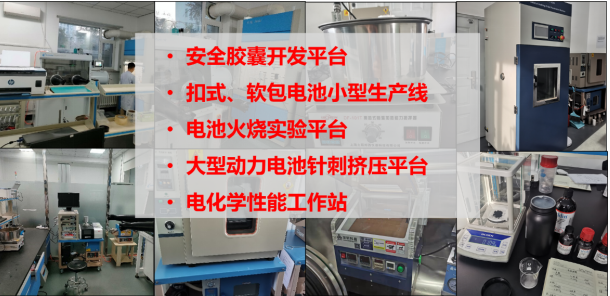
针对新能源汽车动力电池起火爆炸等问题,提出基于安全胶囊的电池热失控抑制解决方案。在电解液中添加5%新型研制安全胶囊可将电解液安全性提升76%,电化学性能提升7%;和采用同量传统阻燃剂相比,安全胶囊可将电解液安全性提升33%,电化学性能提升129%。新型安全胶囊弥补了传统阻燃剂难以同时兼顾电池安全性与电化学性能的不足。
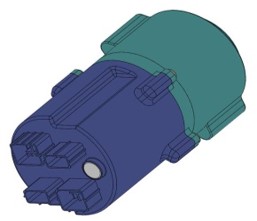
本发明公开了一种换热强度可调的均温液冷板,属于热管理领域,涉及动力电池热管理、IGBT 等电力电子设备冷却问题。它包括盖板 、流道基板 ,其中流道基板 采用了一种沿程换热强度可调的流道结构设计,窄端两侧开有流体进出口,分为均流区 、可调换热区、汇流区 。其中可调换热区 的翅片沿流体流动方向的尺寸可变、排列密集程度依次增加,
通过流道结构的改变,增加流体在流道后半段的流速及换热表面,使换热强度沿流动方向依次提高。该发明通过优化液冷板流道结构,避免流体在换热过程中流体热量积累、换热温差降低所造成的换热效果下降的问题,降低了冷却液流量和液冷系统的成本,同时也解决了液冷板换热的均温性和高效性
线控转向是自动驾驶汽车实现自主转向、路径跟踪与避障避险的关键技术,其性能直接影响主动安全与驾乘体验,是实现高级自动驾驶的基石之一。线控转向冗余设计,是指保证自动驾驶汽车出现电子元件失效或控制系统环境恶化等线控转向系统失效时,系统仍能提供转向等主要功能,保证驾驶员接管后或自主驾驶时自动驾驶汽车仍能以安全的方式运行。
本单位研发的线控冗余转向控制器面向L3及以上自动驾驶汽车,基于双控制器系统冗余架构,具备基本助力、主动转向、横向协调、失效安全、控制权转移等线控转向功能的同时,实现了硬件、通讯、电源等系统的冗余设计,满足功能安全ASIL D等级要求。本单位研发的线控冗余转向控制器是在原有无刷电机EPS产业化基础上进行的深度研发,目前已有控制器样品。
本单位依托清华大学苏州汽车研究院平台,构建了高校研究成果向产业转化、落地、应用的平台,自主掌握转向控制系统核心技术,可为零部件供应商、主机厂等提供线控冗余转向控制系统包括控制器系统架构、应用层软件算法、仿真与测试、底层软件开发、控制器硬件设计等在内的技术开发服务。
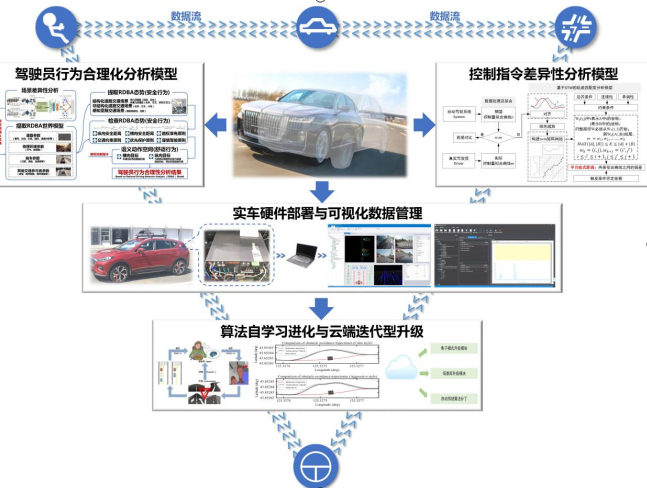
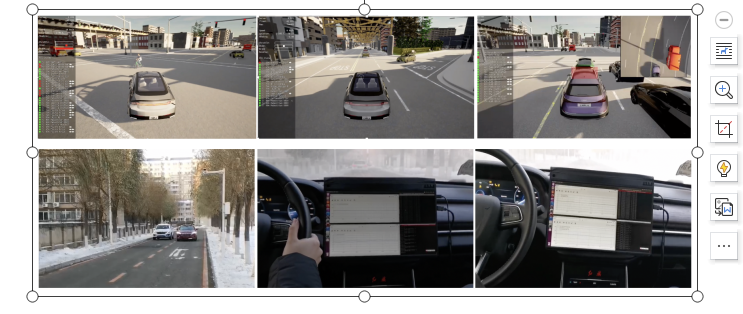
针对自动驾驶系统在无限场景下的测试与验证问题,以驾驶员操控行为数据、车辆行驶状态数据及道路交通环境数据为驱动,创新性的提出了智能汽车影子驾驶系统,解决了“人-车-环”系统中特征数据的高效过滤、精准采集问题,实现了在驾驶行为大数据中人车差异性数据的自动触发式记录控制。同时,基于对驾驶人行为大数据的分析,构建了驾驶人行为合理化分析模型,解决了驾驶人个性化行为决策的合法、合情、合理的判定问题,实现了连续场景下驾驶员操控行为的形式化表达,为实现自我进化型智能汽车设计提供设计依据。
当前主流的车载自适应巡航系统对使用场景有一定要求,大多无法满足低速工况如城市拥堵路段的自动跟驰需求。此外,系统相关控制参数一般默认不变,缺少针对不同驾驶人不同驾驶风格的差异化策略。针对上述问题,基于车辆信息感知与控制技术,充分考虑驾驶人在跟驰行为中的主观危险感及驾驶风格的异质性,实现了自适应驾驶人特征的全速自适应巡航系统技术。首先基于自然驾驶跟驰数据, 考虑驾驶人在跟驰行为中的主观危险感及驾驶风格的异质性,对驾驶人跟驰行为进行了建模;其次在车辆纵向线控改装的基础上,以上述驾驶人跟驰模型为核心算法,实现了实车全速自适应巡航,满足拥堵、启停等工况使用需求;最后实现驾驶人跟驰特征的在线辨识与更新,并将相关参数应用于车辆自适应巡航控制,使系统具有适应不同驾驶人跟驰行为习惯的特性,提高驾驶人的舒适感和适应性。
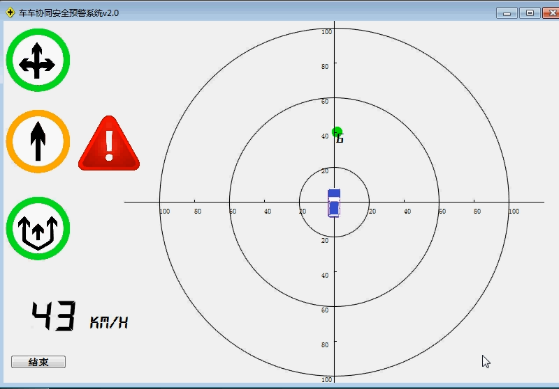
本成果提出了一种基于“双阈值”车胎使用寿命检测方法,开发了驾驶员坐姿自动调整系统,设计了基于汽车行驶音频信息的新能源汽车警示系统。开发了国内外首款“加密绑定仪表控车”的车载网联预警终端产品,解决了商用车休眠状态无缝监控和高可靠行车警示问题。项目成果在商用车前装及后装市场得到广泛应用,获得了客户的认可。
围绕汽车仪表及电控单元形成一批专利技术:“基于萤火虫算法优化BP神经网络的最佳滑移率识别方法”和“汽车组合仪表测试系统V1.0.1”“商用车磁电式轮速传感器检测系统V1.0.1”“商用车霍尔式轮速传感器检测系统V1.0”“商用车仪表生产管理系统V1.0.1”等软件著作权,开发一种高可靠性的通用化智能仪表平台。
围绕汽车转向节开发过程中的检测难题,研发的“一种润滑油油品检测装置”、“一种锻件温度监测装置以及锻造生产辅助系统”专利技术和 “汽车转向节缺陷管理系统V1.0”、“复杂环境下锻件身份识别系统V1.0.1,实现了转向节生产过程中的节能降耗、质量提升,减少了环境污染!
针对圆形隧道内壁清理等作业需求,传统轮式和履带行走机构难以满足要求。设计了一种角度可调的履带行走机构,能够适应不同直径的隧道清扫作业。