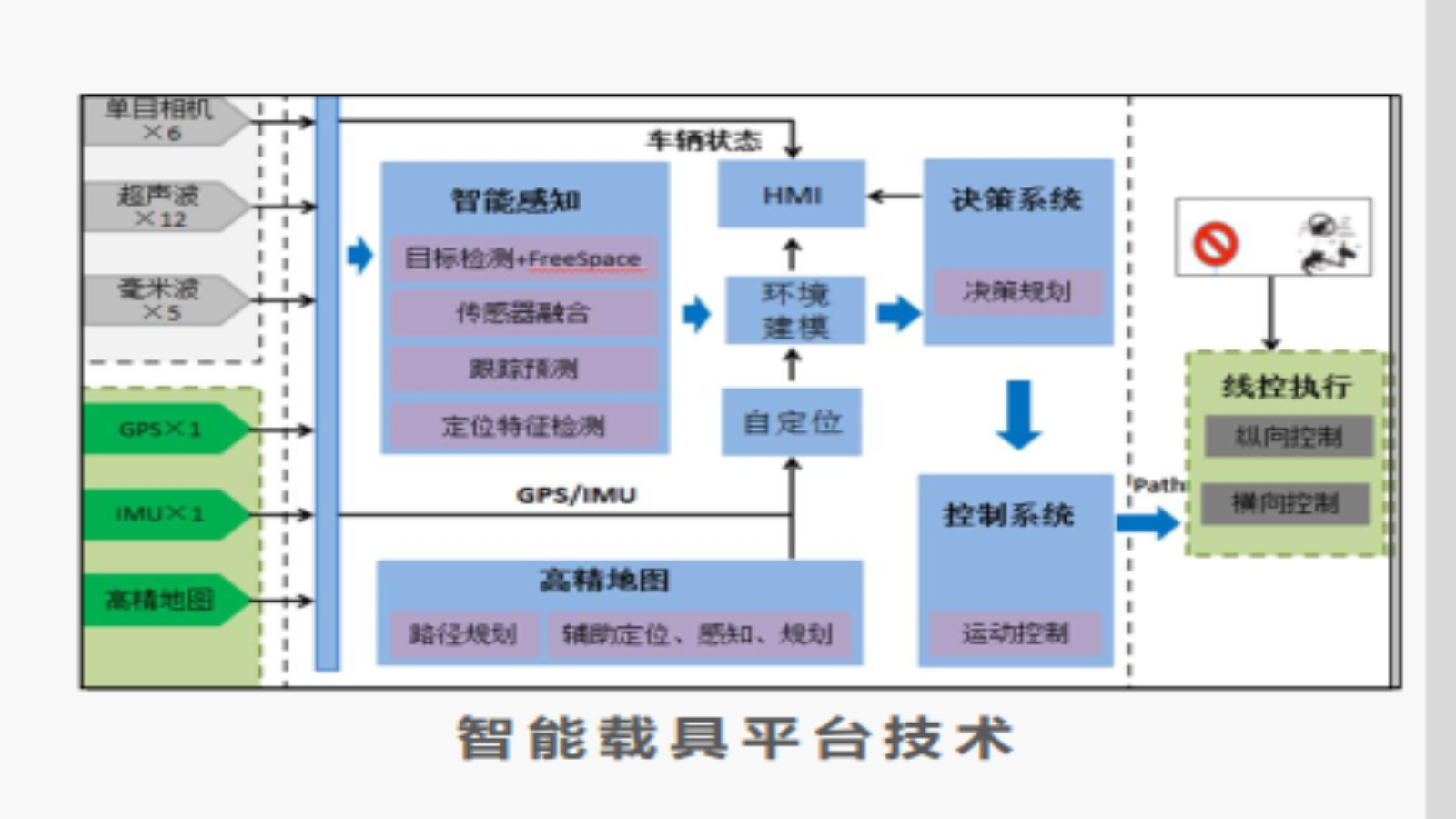
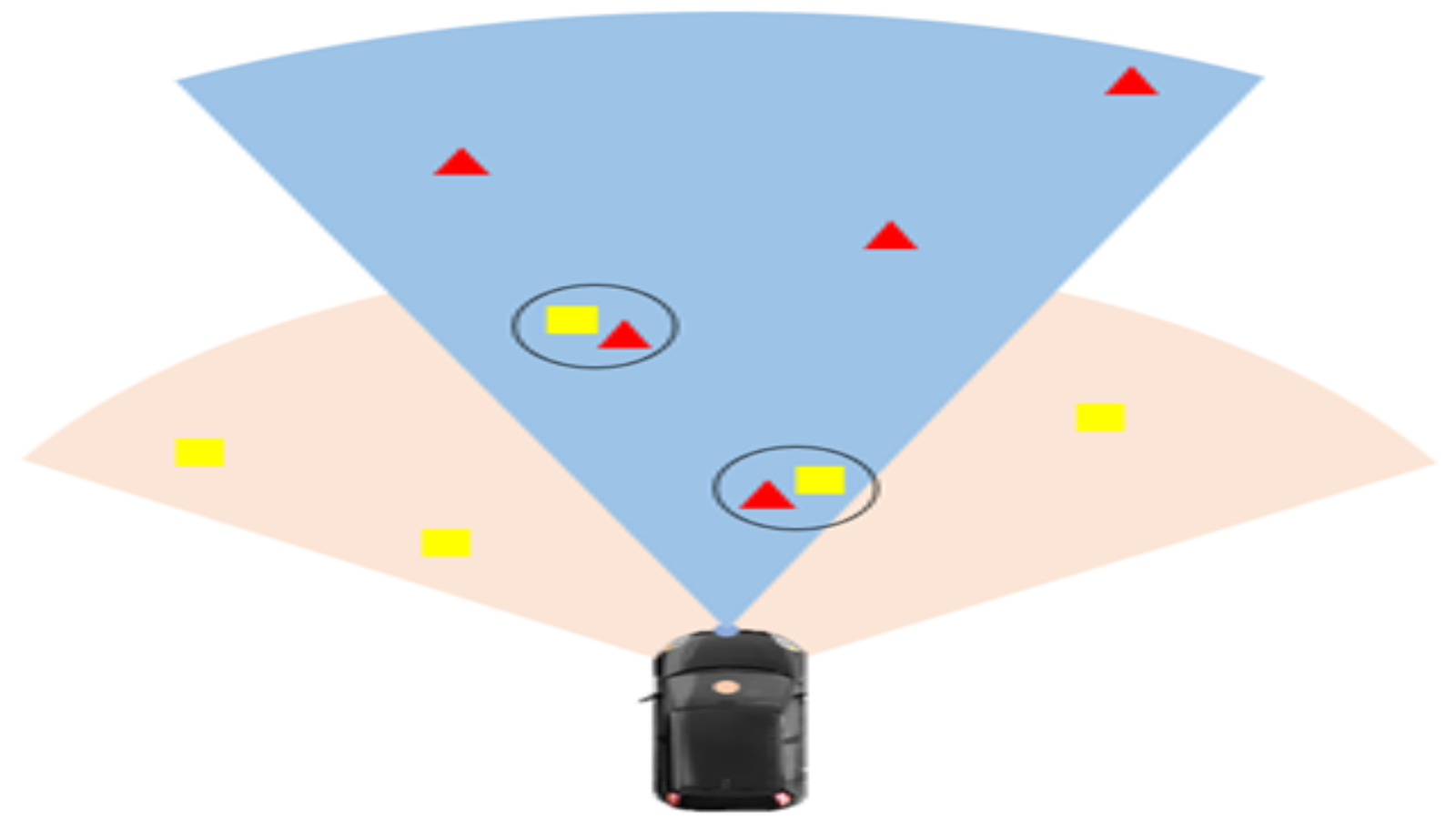
智能纯电动汽车融合智能汽车的安全性与舒适性以及电动汽车节能环保的优势,对环境感知层的机器视觉、激光雷达、毫米波雷达和V2X等数据信息进行融合后,根据车辆自身状态及车辆周边环境决策判断车辆驾驶模式,综合实现车辆自动驾驶需求。
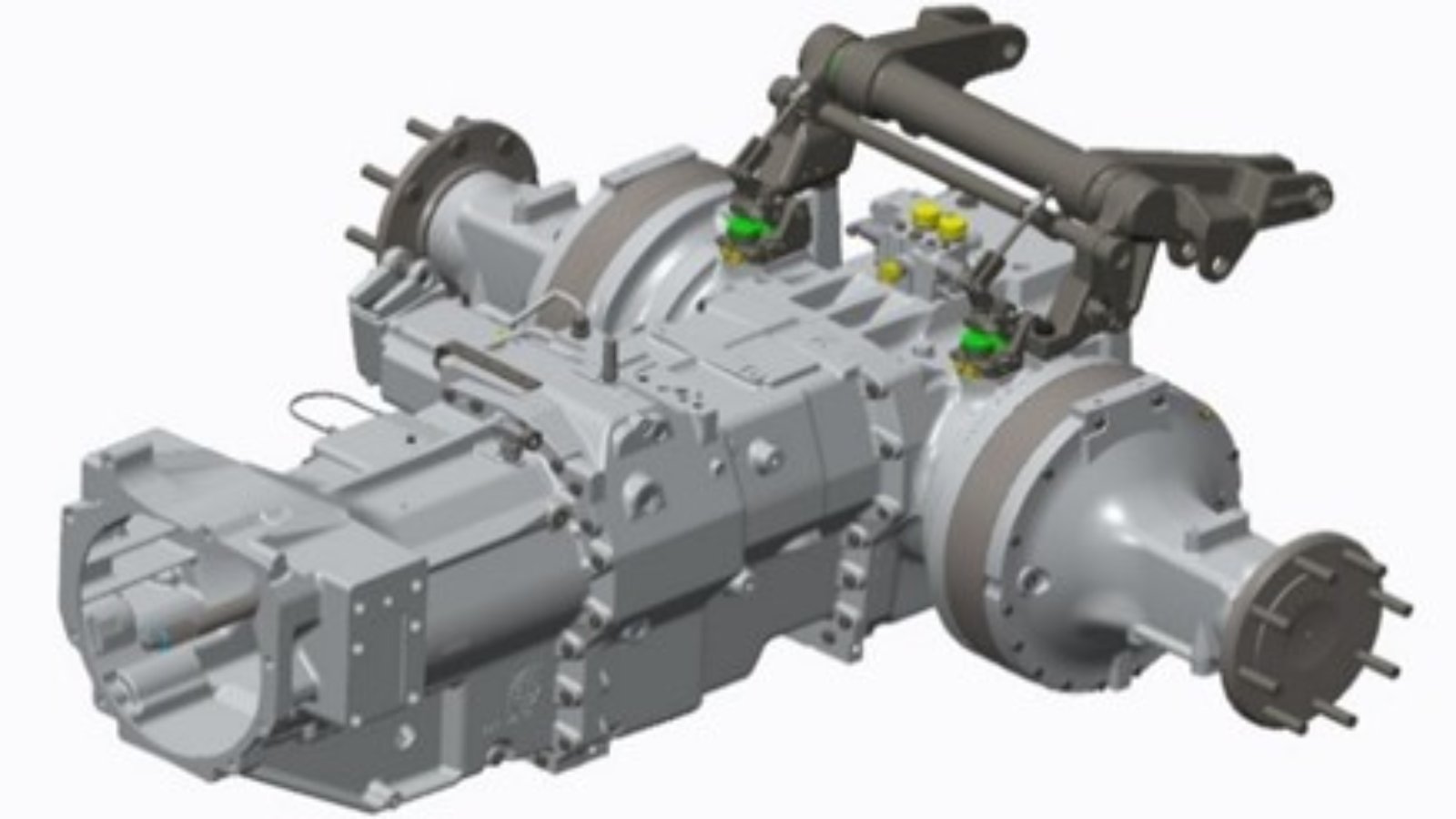
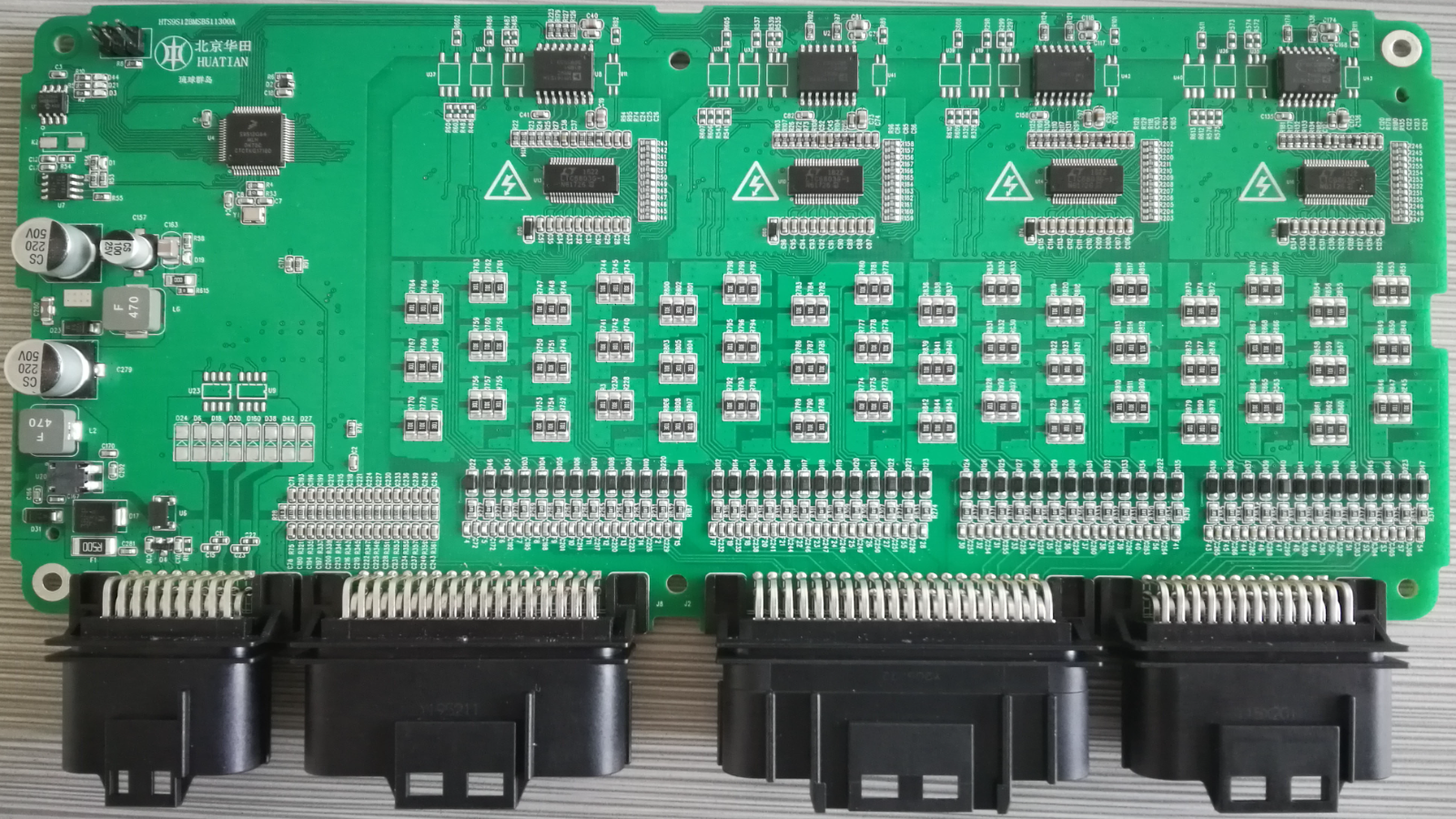
本成果对电动汽车与智能行驶系统进行了一体化设计与集成控制,建立了包含环境感知、智能决策、电驱动以及能量管理等多系统一体化动力学耦合模型,在智能电动汽车一体化模型基础上分析了系统状态和控制变量对车辆安全性、经济性及舒适性的影响,采用系统建模、离线仿真、硬件在环仿真和实车试验相结合的技术方案,运用台架试验、实车试验等测试手段,从硬件、软件两层面入手,开发了智能电动汽车感知、决策和整车控制系统。
目前,自主研发的智能电动汽车已经实现GPS循迹、ACC自适应巡航、AEB自动紧急避撞、LKA车道保持等功能,总体指标达到L3+级自动驾驶水平,促进了汽车智能化和电动化的“两化融合”,实现汽车朝着低碳化、信息化、智能化方向发展。