无人驾驶拖拉机是在现有传统拖拉机上做出改进、拓展和创新,对无人驾驶技术、智能作业与传统拖拉机进行一体化融合,实现智能作业无人驾驶拖拉机自动路径规划导航、智能作业、全工况内无人驾驶,增加亩产、降低投入,全面提升农机行业自动化、信息化、智能化程度。
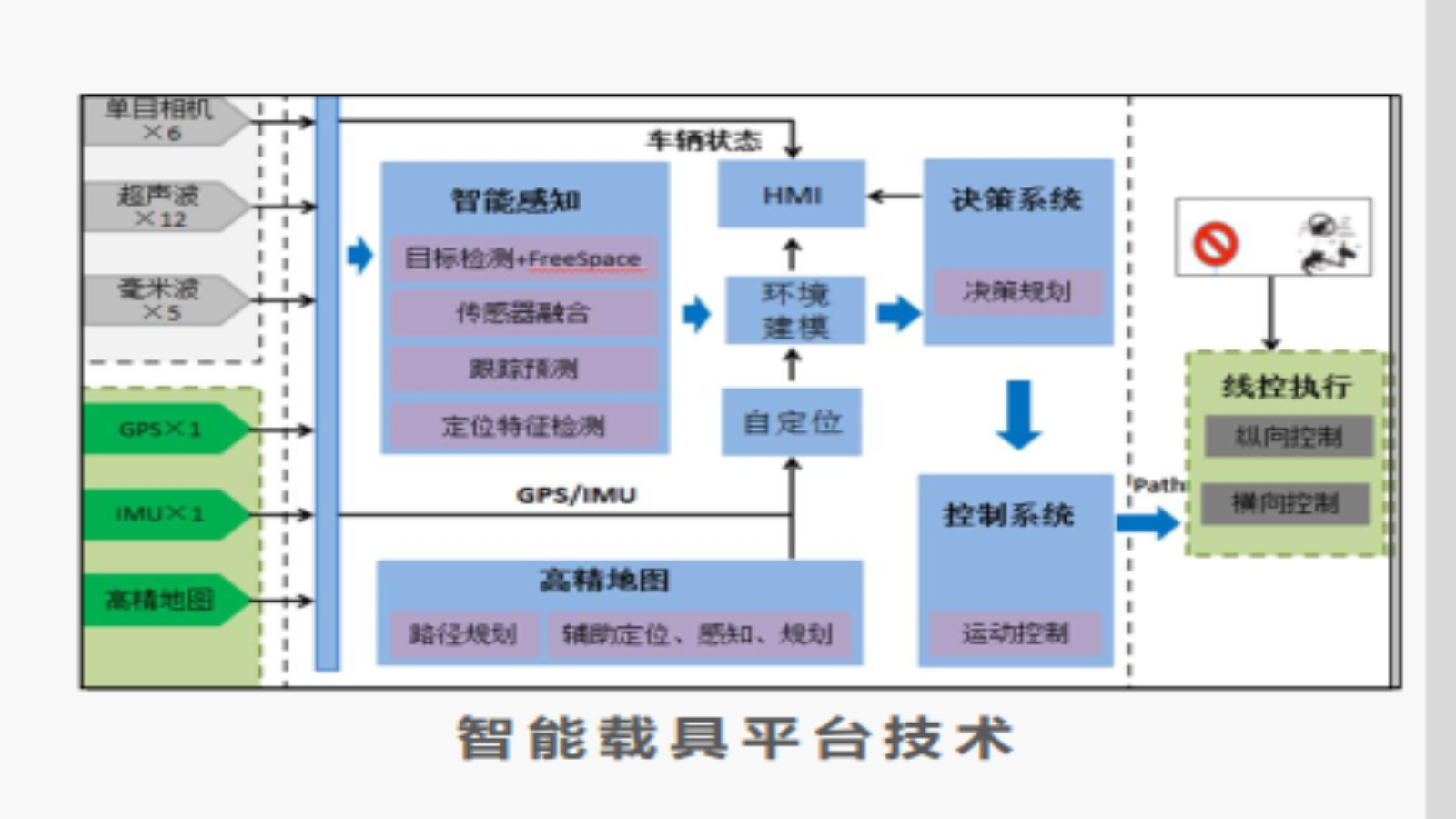
提出了基于RTK移动基站和激光雷达的无人驾驶拖拉机状态、环境信息采集系统技术方案,使用高精定位设备、激光雷达等多种传感器来感知外界信息,利用控制器、上位机等对信息进行决策处理,从而对无人驾驶拖拉机实现精准定位、路径规划、自动导航、智能避障与智能作业。有利于提高农机作业时的作业精度、减少对土壤不必要的碾压、降低漏耕及重耕率,具有良好的工作效率。