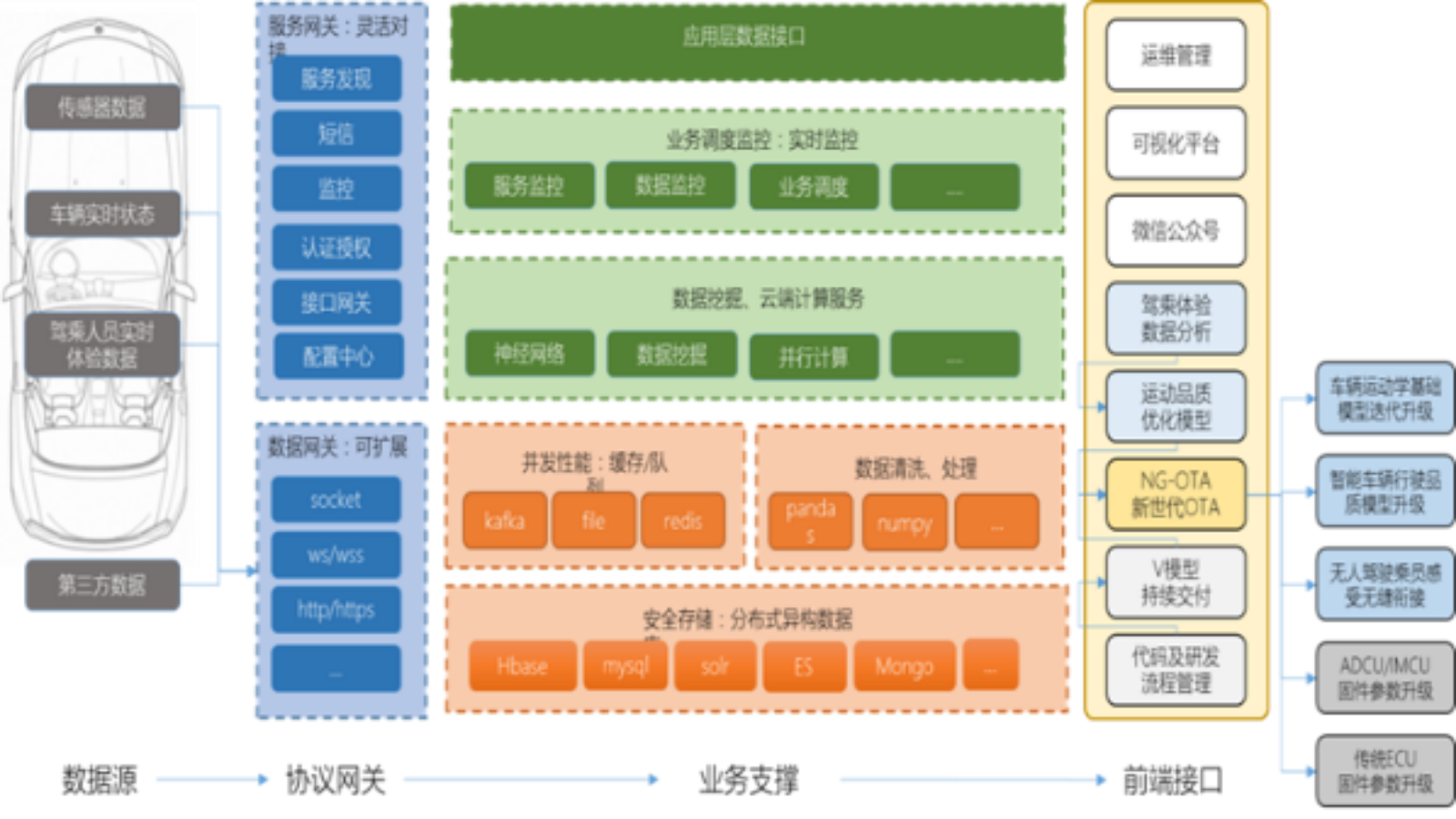
通过将转向、制动、悬架、驱动等各系统控制功能集成于整车域,创新性开发车辆域动力学管理软件架构及各向动力学控制模块及协调控制。通过执行器模型化技术实现控制软件与车辆执行器分离。
教授
将车辆域动力学分为横向,纵向,横摆三维动力学进行控制,各向动力学由统一动力学模型生成控制目标。由协调控制模块负责输出各执行器需求指令,由执行器模型解释为各部件执行输入。通过该技术可将车辆底盘核心动力学性能由软件进行定义。整车厂未来不但可以卖车辆产品同时可以卖各模块的收费服务。