
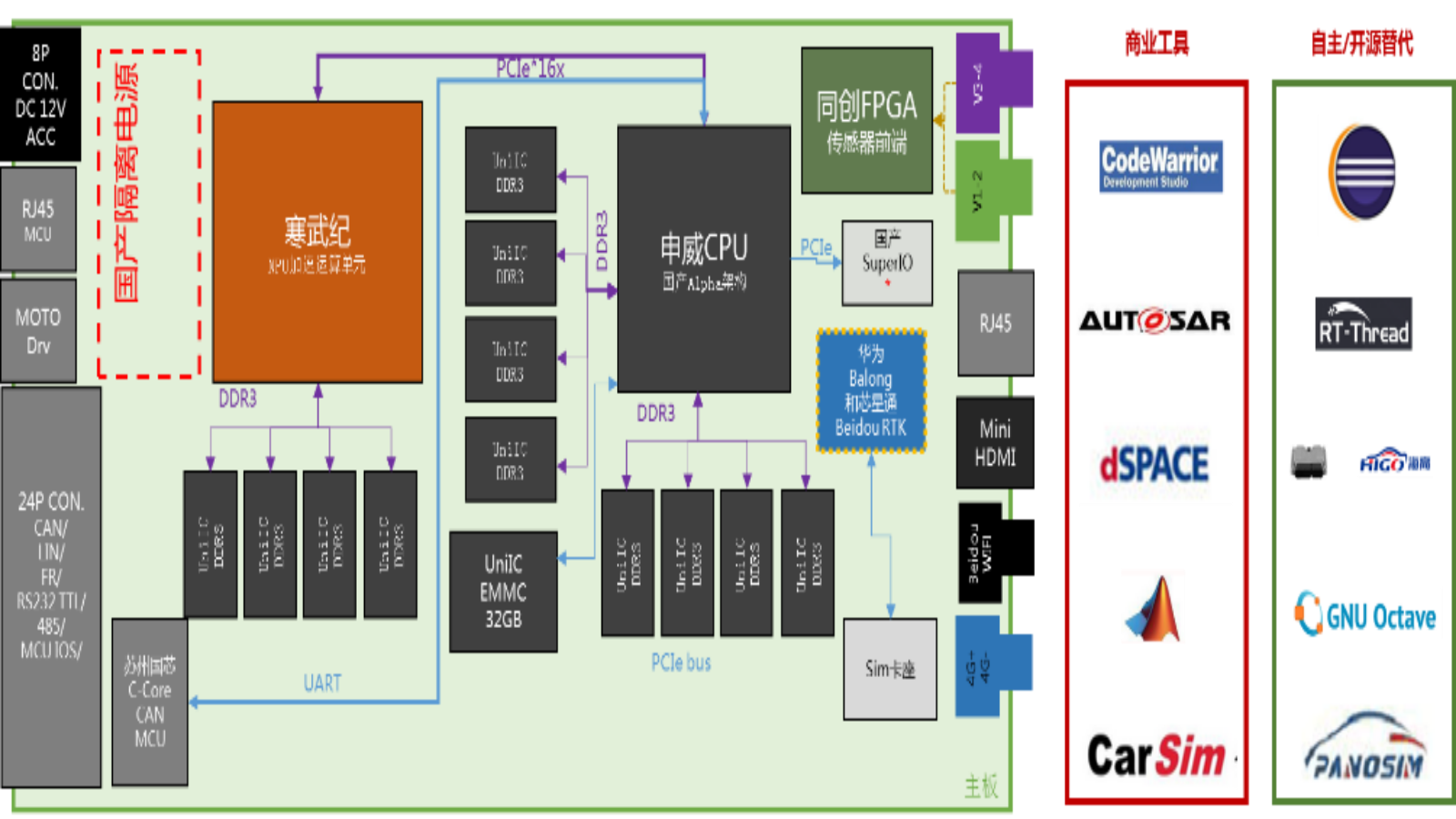
瞄准中国自主可控智能网联汽车计算单元的国家战略需求,开展中国设计中国制造的智能网联汽车专用高性能控制器研发。 • 智能汽车中央域控计算平台:实现视觉、雷达、高精定位等多传感器信息融合、可行驶区域动态建模及预期行驶轨迹多目标决策。 • 智能汽车底盘运动控制平台:实现汽车运动控制和底盘线控化。

通过驱动电机与行星减速器高效集成,形成高集成度、大输出转矩(13000N.m以上)的轮毂电机,并开发出适配该轮毂电机的整车控制模块,具有高效、节能、性价比高的特点。
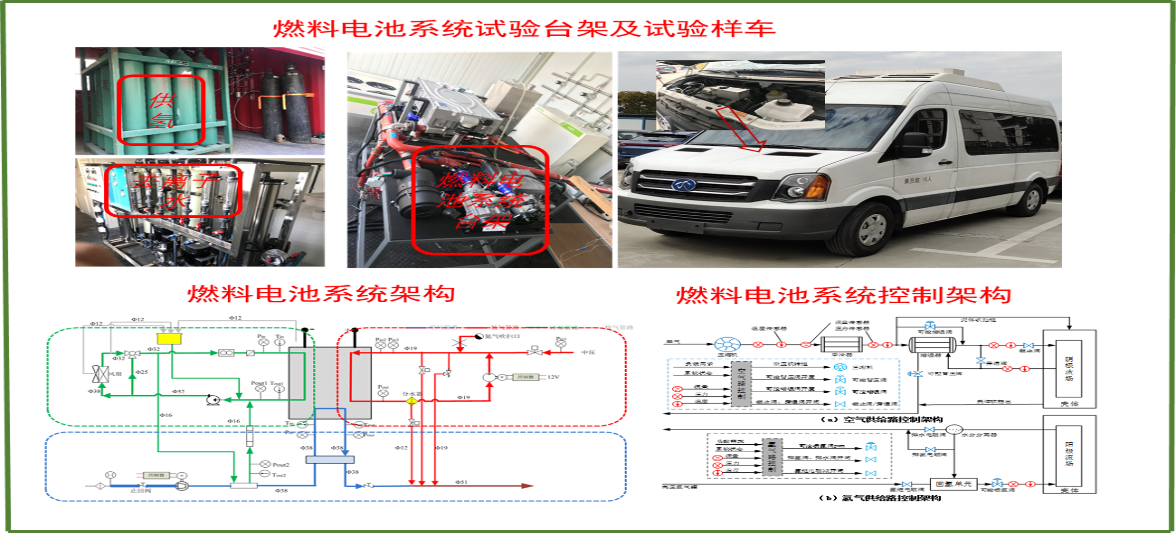
针对燃料电池发动机系统效率、低温冷启动时间与燃料电池汽车的整车经济性等关键技术指标,从燃料电池整车和燃料电池发动机系统两个层次开展动态机理建模与关键控制技术研究。在整车层面研究燃料电池汽车多动力源耦合机理,建立燃料电池与动力电池以及整车动力系统的动态模型,在系统层面建立燃料电池系统关键部件的高精度动态模型,进而实现两个层面在不同工况下的联合仿真分析;开发燃料电池系统级水、气、电协调控制策略,并进行MIL->HIL->实验台架多轮验证;合作企业搭建了燃料电池系统台架,并将实验台架系统改装至轻型客车上,为策略

针对电动及混合动力汽车形成了集构型方案、节能机理、控制策略、仿真技术和试验测试为一体的理论及工程应用体系。提出的基于车辆运行特征的混合动力系统多因素参数匹配方法,充分考虑了系统效率、控制策略、部件等多重限制,以匹配得到最佳系统方案;可根据用户特定需求,针对不同系统进行导向性的动力性和经济性计算与分析,从节能机理出发,深入挖掘节能潜力;拥有成熟的混合动力系统控制软件架构,涵盖信号处理、故障诊断、电管理、附件控制、能量管理和动态协调等多种功能模块。所研究的行星混动系统及相关设计、控制理论和技术成功应用于宇通插
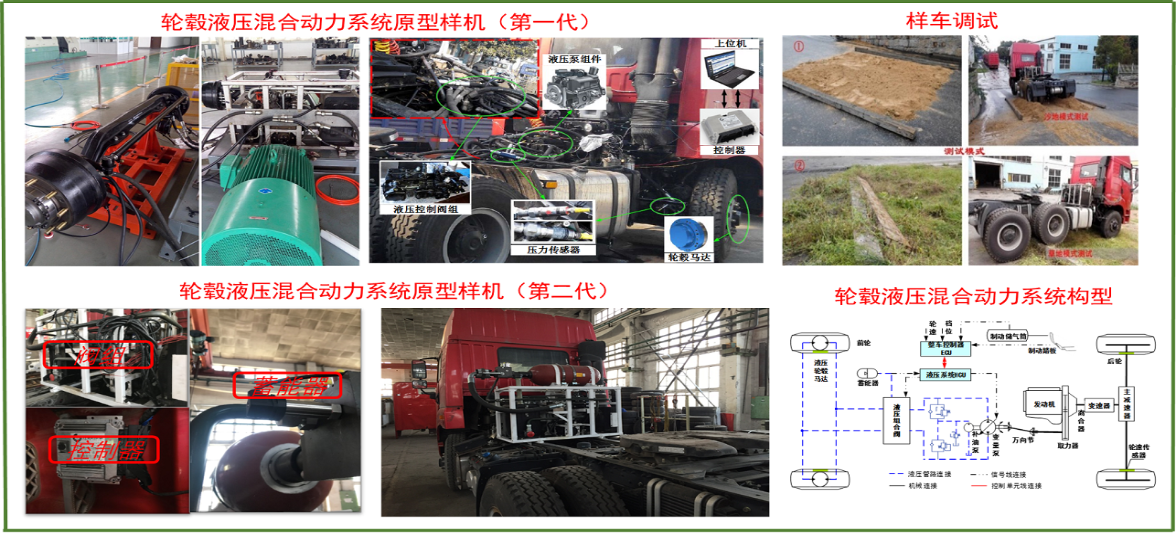
针对当前重型商用车的驱动形式单一,柔性化功能差,无法兼顾恶劣路面低速通过性和良好公路高速行驶稳定性的问题。在国内率先提出了一种系列化多功能的轮毂液压混合动力系统构型方案,相应开发出闭式液压回路和开式液压回路集成的多模式能量管理算法;提出的稳态前馈+模型预测动态反馈复合控制方法,有效解决了液压轮毂和后轮机械驱动耦合的难题。经过数年的技术攻关,成功将此技术应用于解放JH6和天V车型,提高了传统重型商用车的整车动力性和经济性,突破了欧美发达国家的长期技术垄断。由该技术研发的重型商用车轮毂液压前桥总成已出口法国,
通过将转向、制动、悬架、驱动等各系统控制功能集成于整车域,创新性开发车辆域动力学管理软件架构及各向动力学控制模块及协调控制。通过执行器模型化技术实现控制软件与车辆执行器分离。
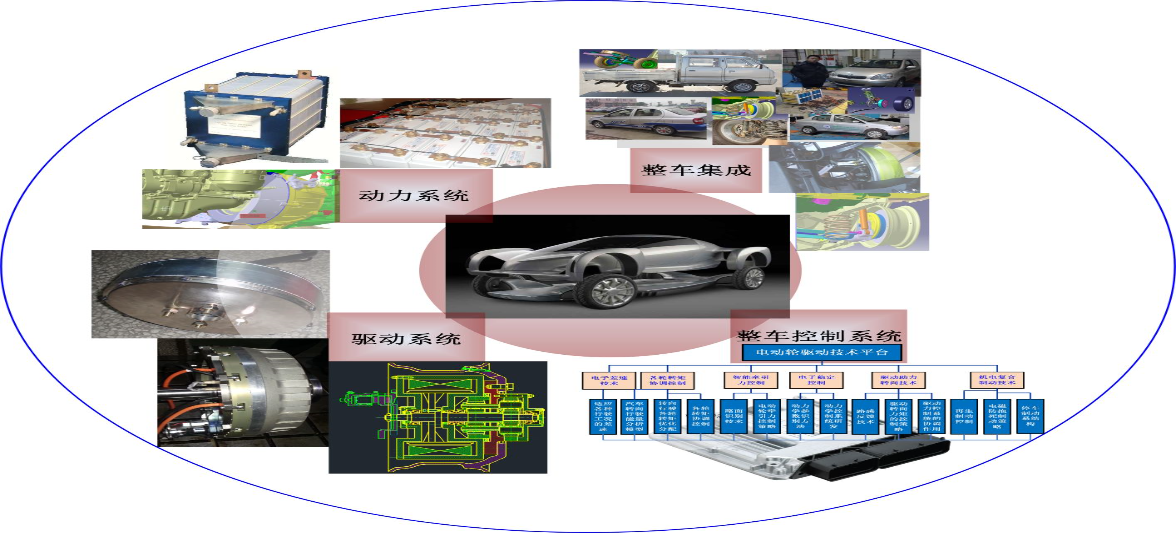
在轮毂电机驱动系统方面具有动力系统、驱动系统、整车集成、整车控制等一系列成熟技术成果,可提供交钥匙工程服务
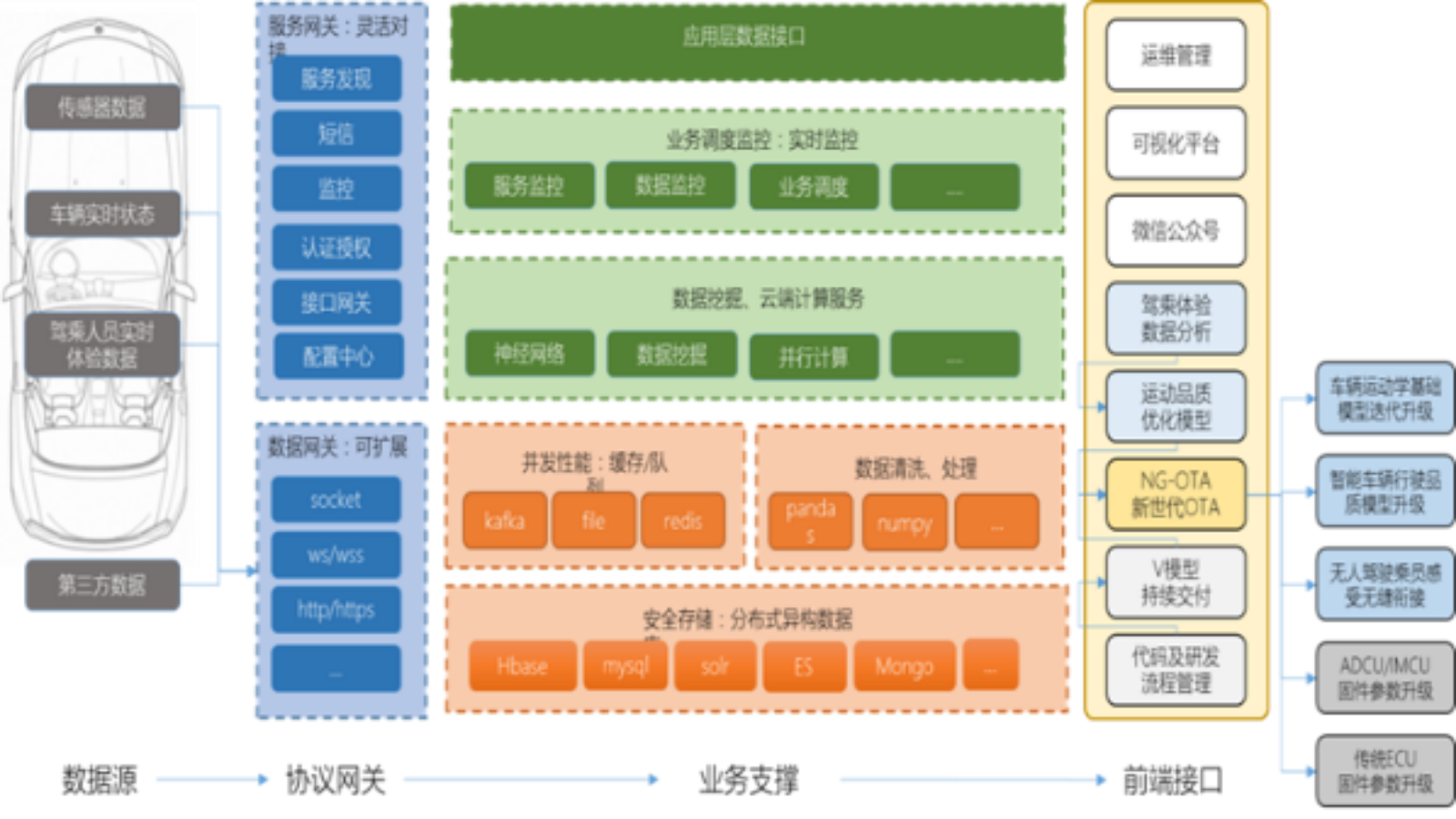
瞄准中国制造2025提出的掌握智能网联汽车核心技术的行业重大技术需求,依托吉大汽车“人-车-路闭环系统运动学与动力学智能控制”优势,开展智能汽车多传感器融合感知-可行驶区域认知-预期轨迹决策-运动学与动力学控制-2纵1横1垂线控技术研发。 • 不同级别智能驾驶的“算法-软件-硬件-平台一体化解决方案”。 • “车辆动力学+运动学+线控执行+驾驶行为+驾驶员生理体验”的五位一体行驶品质优化。 • 智能网联汽车数据监控调度平台与OTA升级服务。
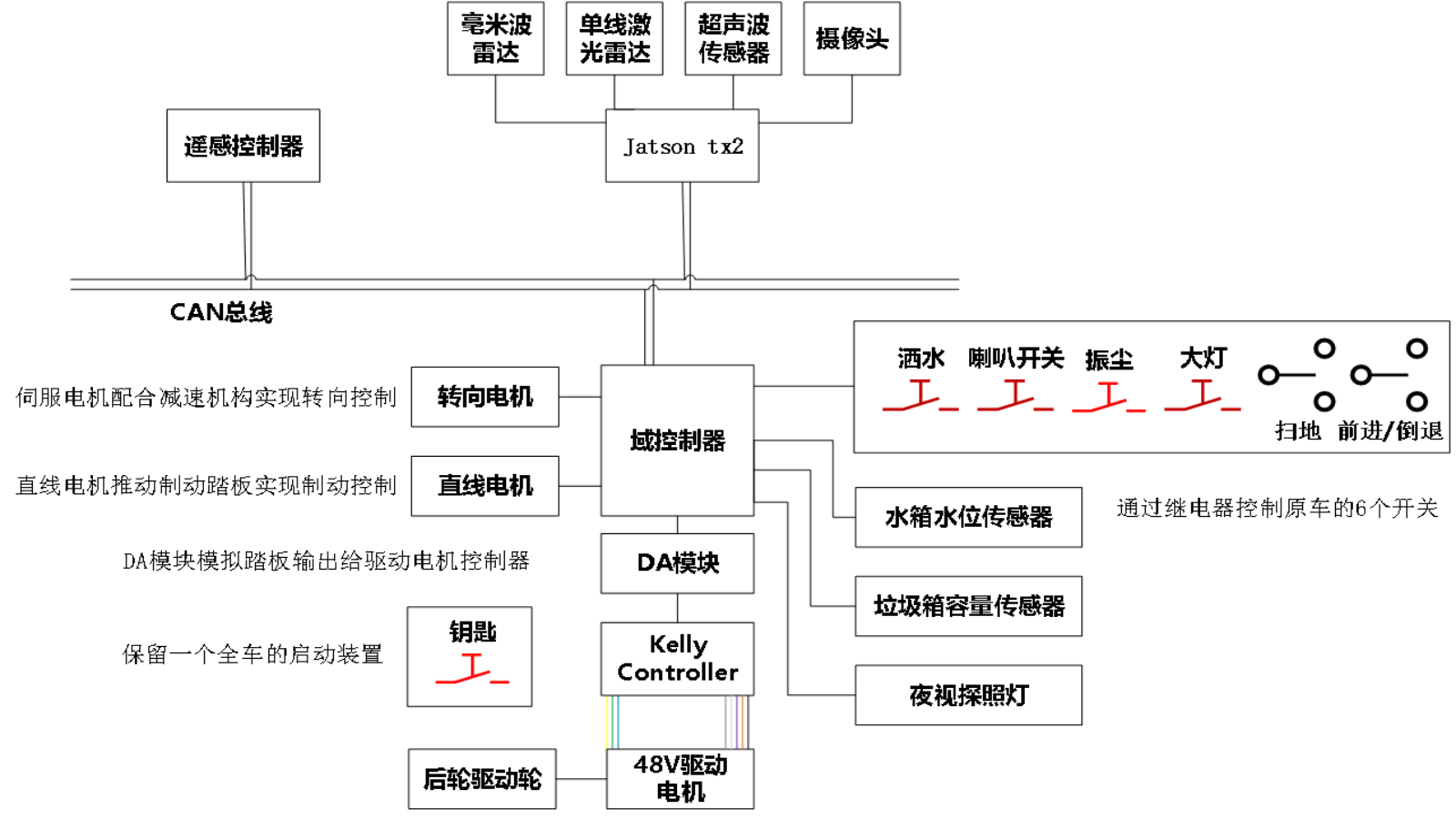
基于电动清扫车平台,提供具备量产前景、高性价比的智能网联驾驶组件及平台设计方案,从而将现有的机械化清扫升级换代为无人驾驶的自动作业机械化清扫。 • 基于现有在售车型,提供自动驾驶套件的前装设计方案。 • 针对新一代无人驾驶清扫车,开发全新的低速无人驾驶底盘运动平台。 • 从机电液控制角度,协助清扫车企业升级产品研发能力,优化清扫作业机构。

现有的汽车A柱结构势必导致驾驶员前方视野存在盲区。汽车A柱透视化车载显示装置通过摄像头采集车辆外部环境信息,并通过视觉算法的整合处理,将适应驾驶员的被A柱遮挡的驾驶图像通过布置于车辆A柱位置的LED显示屏实时显示。在确定驾驶员视角的条件下,准确快速的计算出驾驶员对应盲区位置,进而通过透视、仿射等变换在对应的位置补偿A柱盲区图像。本成果建立了汽车行驶环境的自然视野图像融合算法,具有计算量小、实时性好、适应性强的特点,可以在不同车型上快速的实现匹配。


