

无人驾驶拖拉机是在现有传统拖拉机上做出改进、拓展和创新,对无人驾驶技术、智能作业与传统拖拉机进行一体化融合,实现智能作业无人驾驶拖拉机自动路径规划导航、智能作业、全工况内无人驾驶,增加亩产、降低投入,全面提升农机行业自动化、信息化、智能化程度。

智能纯电动汽车融合智能汽车的安全性与舒适性以及电动汽车节能环保的优势,对环境感知层的机器视觉、激光雷达、毫米波雷达和V2X等数据信息进行融合后,根据车辆自身状态及车辆周边环境决策判断车辆驾驶模式,综合实现车辆自动驾驶需求。
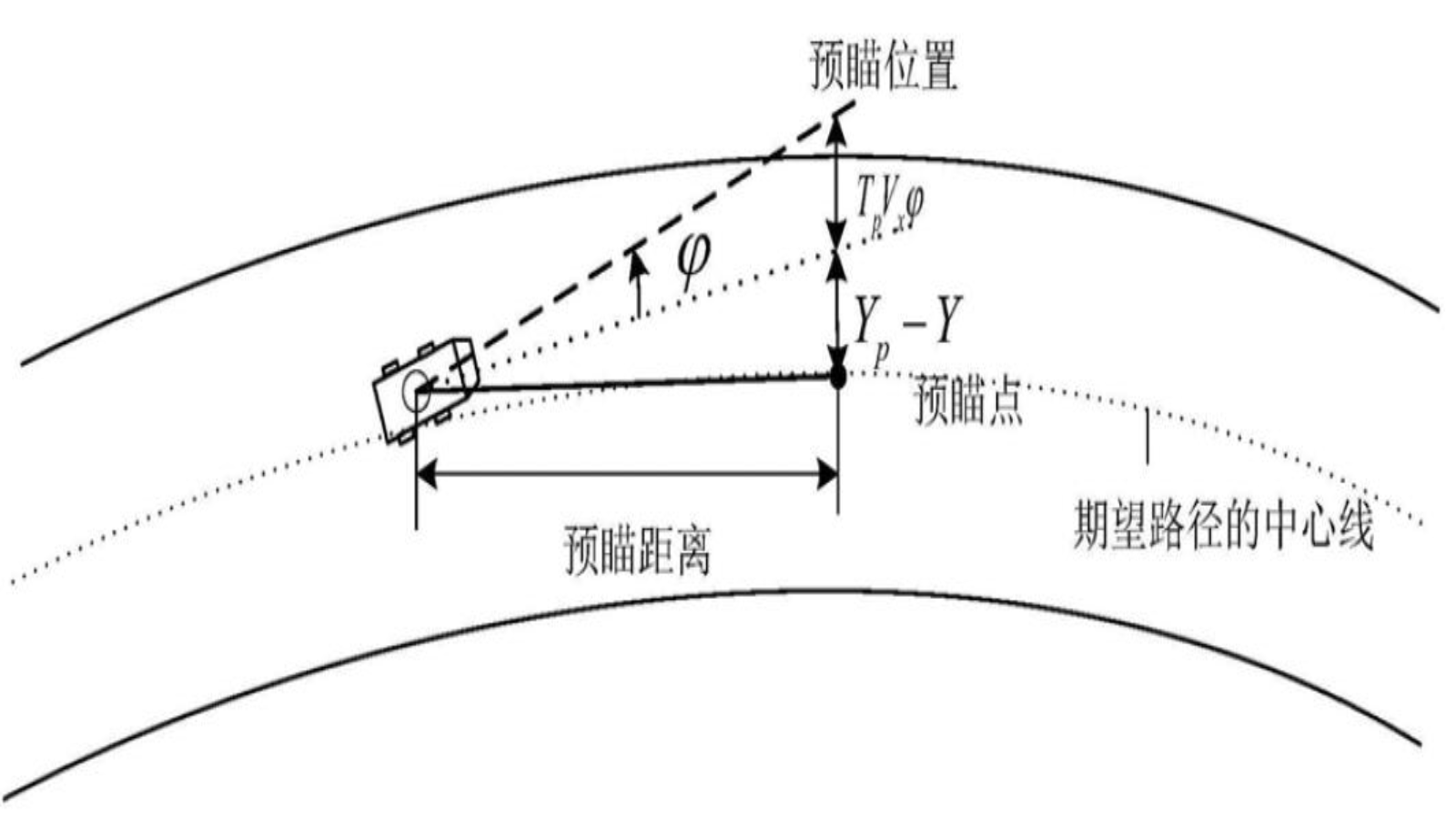
本发明公开了一种考虑驾驶员特性的差动辅助转向与共享控制系统建模方法。本发明的方法包括步骤(a)建立二自由度的车辆动力学简化模型和车辆质心位置在惯性空间下的坐标模型;(b)建立车辆轮胎的侧向力的简化模型;(c)建立车辆转向系统的转向柱动力学模型;(d)建立差动辅助系统作用下的驾驶员模型。本发明通过安装在转向柱上的转角传感器和扭矩传感器检测检测方向盘的角位移和作用于方向盘的力矩,将检测结果与车速、期望路径相结合,并考虑驾驶员特性按照一定的控制算法控制轮毂电机输出相应的差动力矩来辅助驾驶员更好的驾驶车辆。

提供了一种一种纯电动方程式赛车整车电气系统,实现赛车的动力系统、高压电安全、硬件预警保护等控制,解决了电动赛车线束布置复杂、CAN信号抗干扰能力弱、电气系统的鲁棒性差等问题。
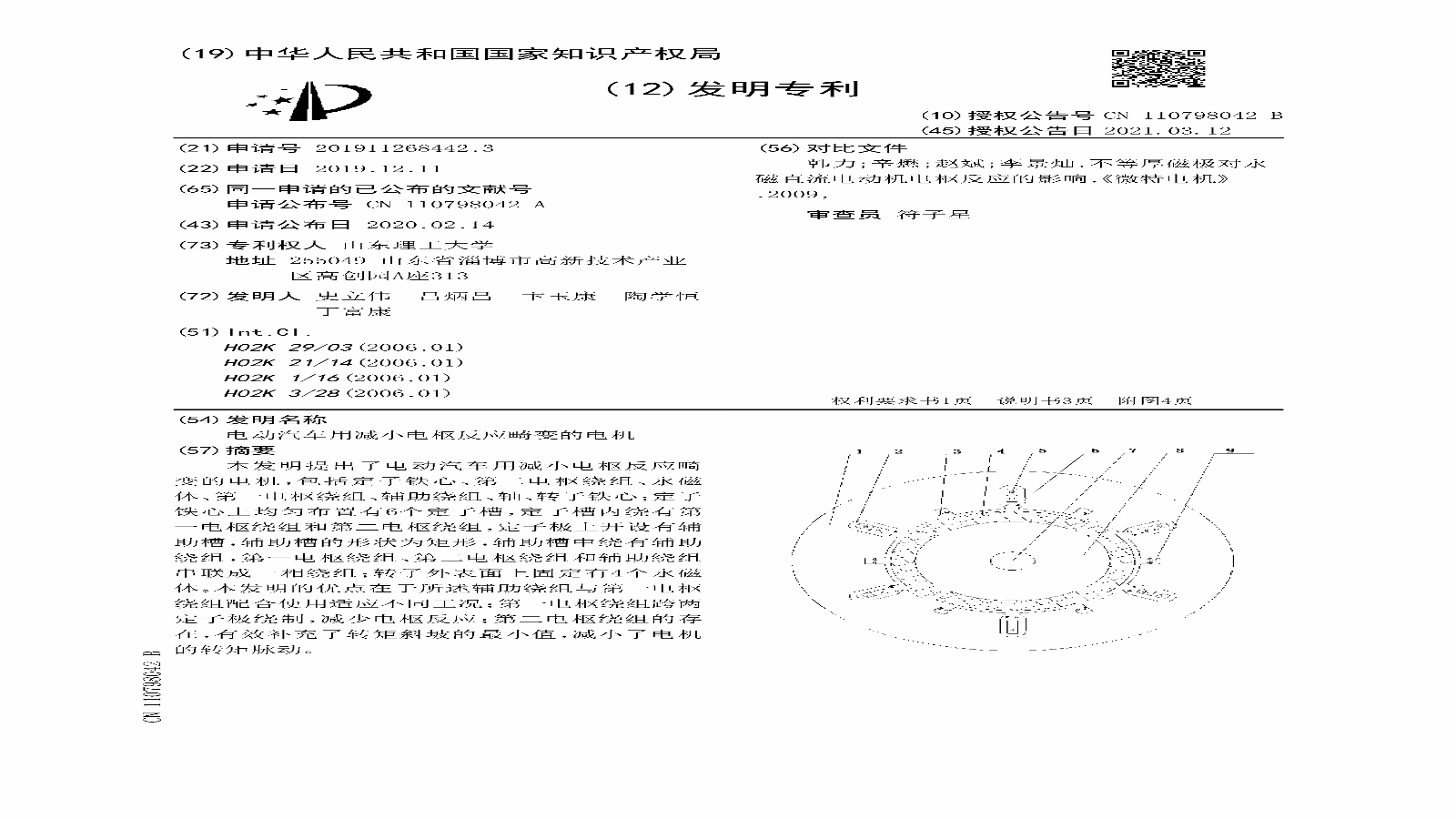
永磁同步电机还存在总谐波含量高和易受电枢反应影响等缺点。本项目发明的技术提出了一种辅助气隙和辅助绕组的结构,能够有效改变d轴电感与q轴电感的比值,防止q轴磁通饱和,从而能更充分的利用磁阻转矩。同时,辅助气隙和辅助绕组的不均匀分布,会使电枢反应产生的电枢磁势下降的不均匀,经过辅助气隙的电枢磁势与永磁磁势合成的合成磁势回更接近与正弦。

通过驱动电机与行星减速器高效集成,形成高集成度、大输出转矩(13000N.m以上)的轮毂电机,并开发出适配该轮毂电机的整车控制模块,具有高效、节能、性价比高的特点。
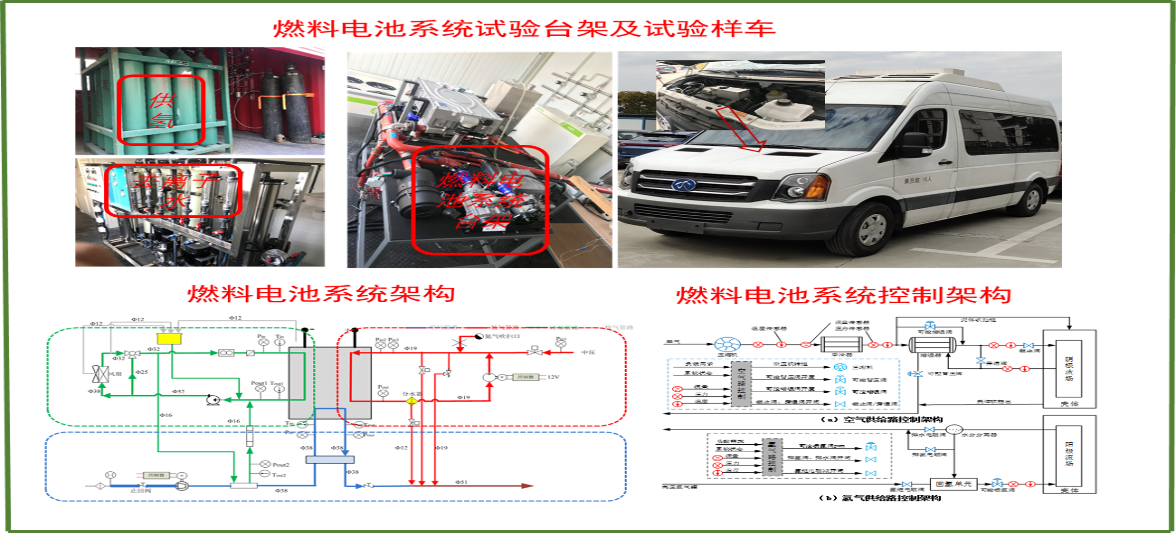
针对燃料电池发动机系统效率、低温冷启动时间与燃料电池汽车的整车经济性等关键技术指标,从燃料电池整车和燃料电池发动机系统两个层次开展动态机理建模与关键控制技术研究。在整车层面研究燃料电池汽车多动力源耦合机理,建立燃料电池与动力电池以及整车动力系统的动态模型,在系统层面建立燃料电池系统关键部件的高精度动态模型,进而实现两个层面在不同工况下的联合仿真分析;开发燃料电池系统级水、气、电协调控制策略,并进行MIL->HIL->实验台架多轮验证;合作企业搭建了燃料电池系统台架,并将实验台架系统改装至轻型客车上,为策略

针对电动及混合动力汽车形成了集构型方案、节能机理、控制策略、仿真技术和试验测试为一体的理论及工程应用体系。提出的基于车辆运行特征的混合动力系统多因素参数匹配方法,充分考虑了系统效率、控制策略、部件等多重限制,以匹配得到最佳系统方案;可根据用户特定需求,针对不同系统进行导向性的动力性和经济性计算与分析,从节能机理出发,深入挖掘节能潜力;拥有成熟的混合动力系统控制软件架构,涵盖信号处理、故障诊断、电管理、附件控制、能量管理和动态协调等多种功能模块。所研究的行星混动系统及相关设计、控制理论和技术成功应用于宇通插
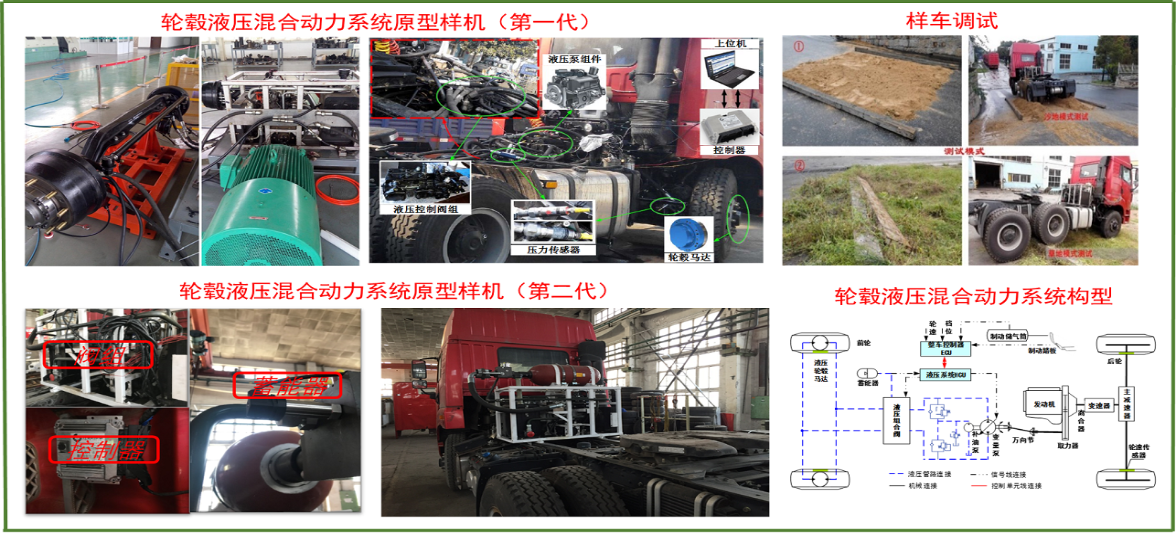
针对当前重型商用车的驱动形式单一,柔性化功能差,无法兼顾恶劣路面低速通过性和良好公路高速行驶稳定性的问题。在国内率先提出了一种系列化多功能的轮毂液压混合动力系统构型方案,相应开发出闭式液压回路和开式液压回路集成的多模式能量管理算法;提出的稳态前馈+模型预测动态反馈复合控制方法,有效解决了液压轮毂和后轮机械驱动耦合的难题。经过数年的技术攻关,成功将此技术应用于解放JH6和天V车型,提高了传统重型商用车的整车动力性和经济性,突破了欧美发达国家的长期技术垄断。由该技术研发的重型商用车轮毂液压前桥总成已出口法国,
通过将转向、制动、悬架、驱动等各系统控制功能集成于整车域,创新性开发车辆域动力学管理软件架构及各向动力学控制模块及协调控制。通过执行器模型化技术实现控制软件与车辆执行器分离。





