
在轮毂电机驱动系统方面具有动力系统、驱动系统、整车集成、整车控制等一系列成熟技术成果,可提供交钥匙工程服务

实验4D毫米波雷达点云探测成像,可用于智能汽车辅助驾驶和自动驾驶环境感知,以及车路协同路测环境感知。
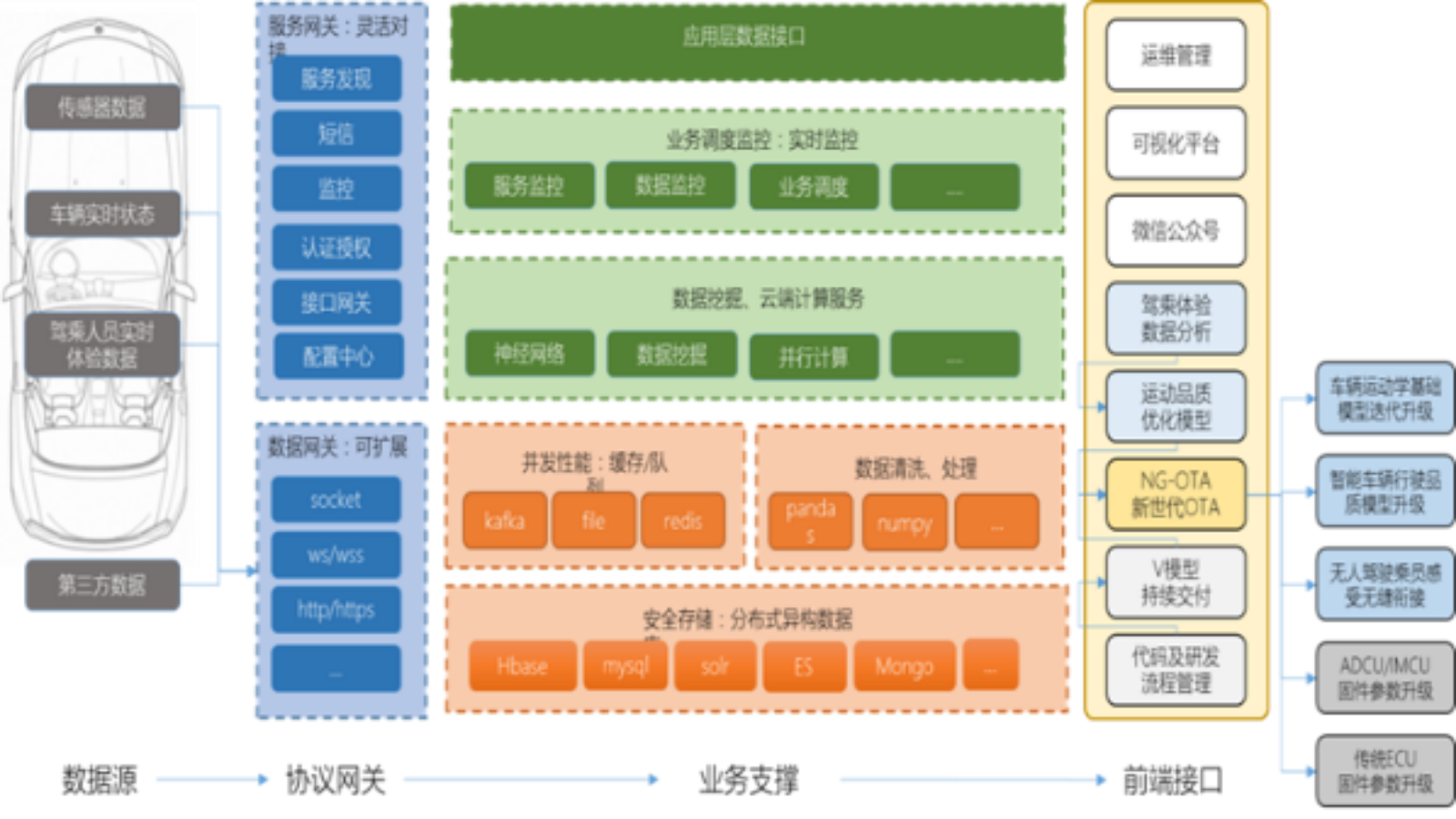
瞄准中国制造2025提出的掌握智能网联汽车核心技术的行业重大技术需求,依托吉大汽车“人-车-路闭环系统运动学与动力学智能控制”优势,开展智能汽车多传感器融合感知-可行驶区域认知-预期轨迹决策-运动学与动力学控制-2纵1横1垂线控技术研发。 • 不同级别智能驾驶的“算法-软件-硬件-平台一体化解决方案”。 • “车辆动力学+运动学+线控执行+驾驶行为+驾驶员生理体验”的五位一体行驶品质优化。 • 智能网联汽车数据监控调度平台与OTA升级服务。
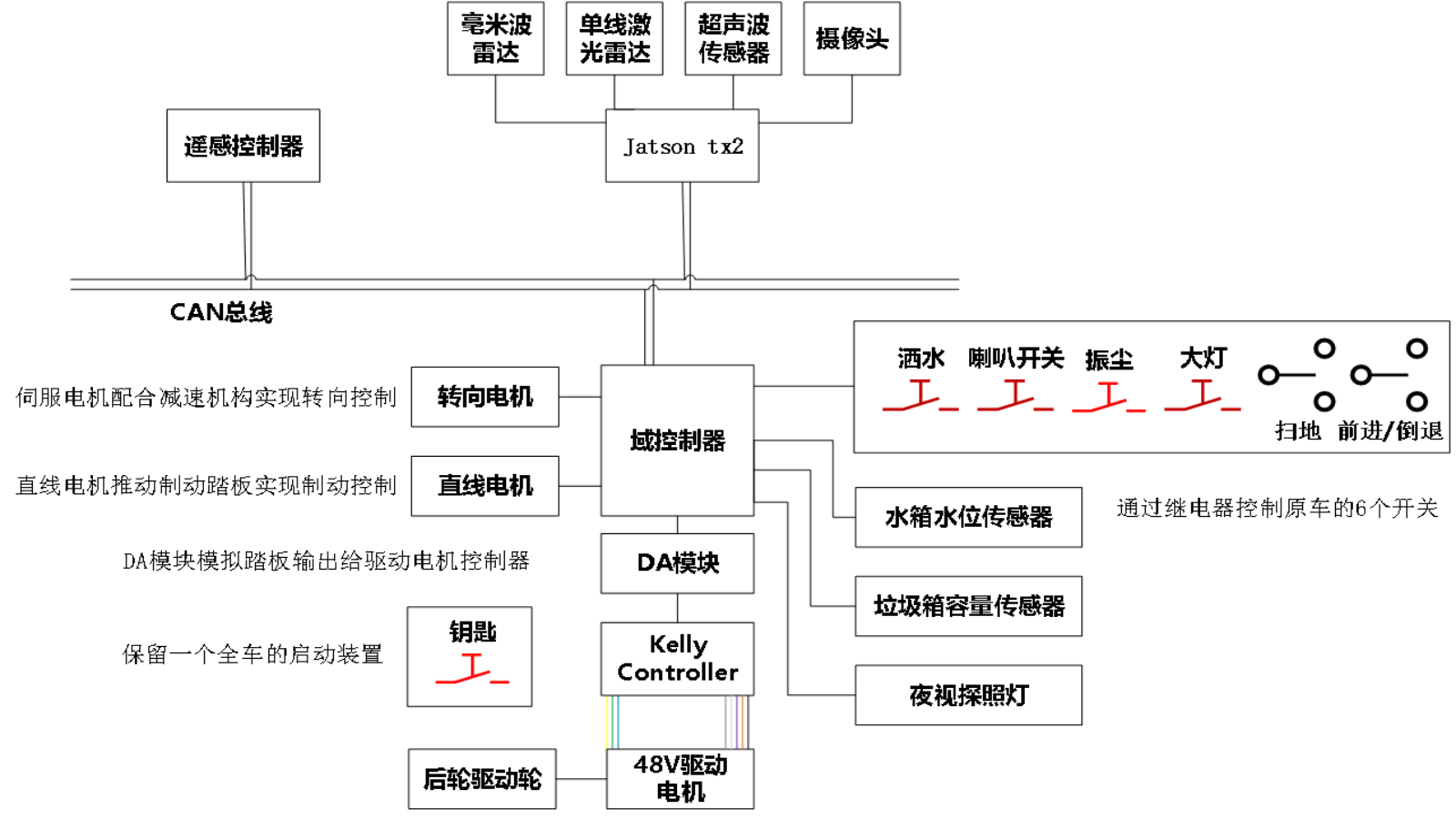
基于电动清扫车平台,提供具备量产前景、高性价比的智能网联驾驶组件及平台设计方案,从而将现有的机械化清扫升级换代为无人驾驶的自动作业机械化清扫。 • 基于现有在售车型,提供自动驾驶套件的前装设计方案。 • 针对新一代无人驾驶清扫车,开发全新的低速无人驾驶底盘运动平台。 • 从机电液控制角度,协助清扫车企业升级产品研发能力,优化清扫作业机构。

现有的汽车A柱结构势必导致驾驶员前方视野存在盲区。汽车A柱透视化车载显示装置通过摄像头采集车辆外部环境信息,并通过视觉算法的整合处理,将适应驾驶员的被A柱遮挡的驾驶图像通过布置于车辆A柱位置的LED显示屏实时显示。在确定驾驶员视角的条件下,准确快速的计算出驾驶员对应盲区位置,进而通过透视、仿射等变换在对应的位置补偿A柱盲区图像。本成果建立了汽车行驶环境的自然视野图像融合算法,具有计算量小、实时性好、适应性强的特点,可以在不同车型上快速的实现匹配。
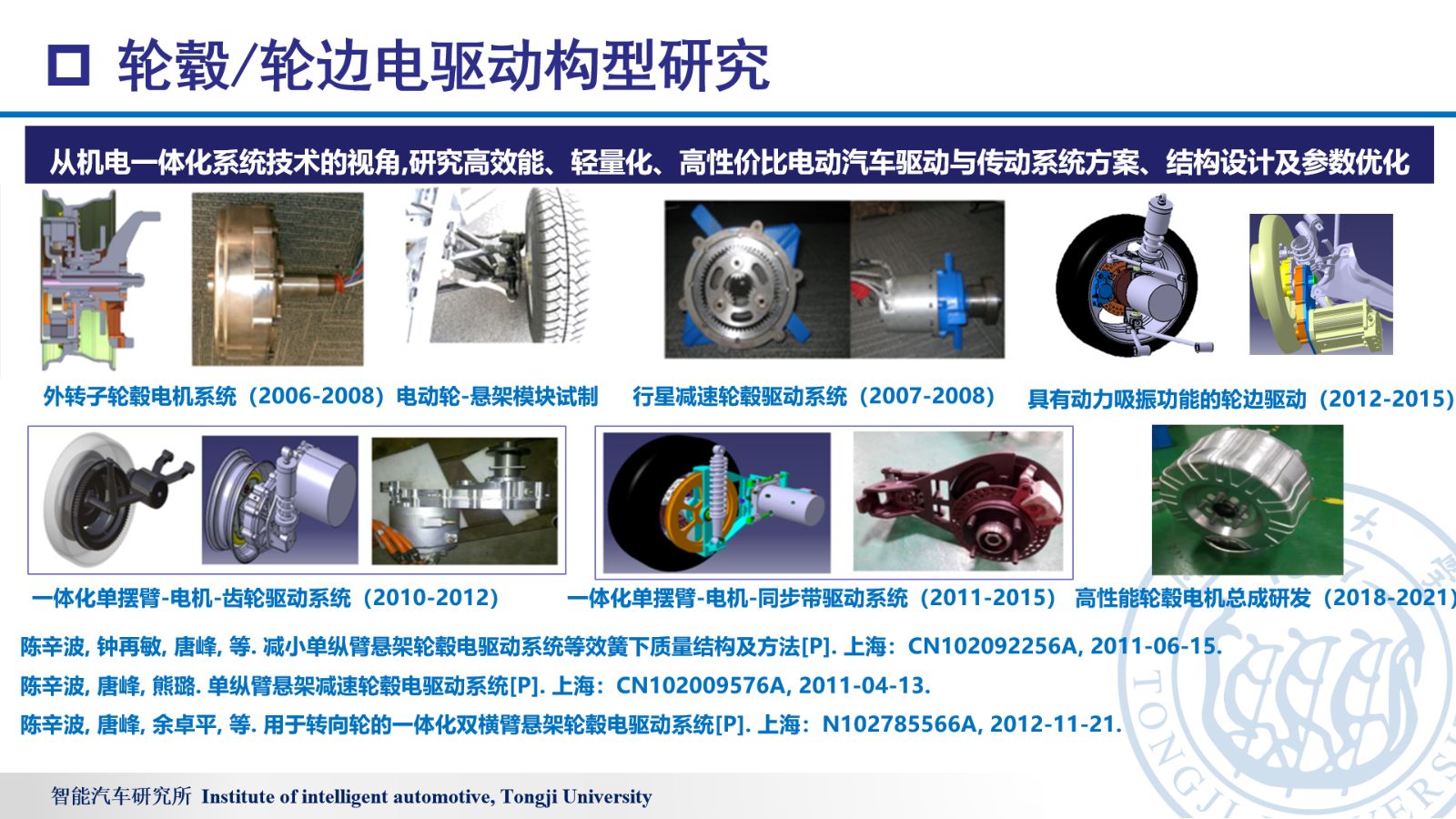
相对于集中电机驱动方案,采用轮毂或/和轮边电机的分布式电 驱动方案在底盘高效节能、低地板大空间和操纵稳定性等方面具 有显著的技术优势。项目以同济大学承担的863 课题和专利成果 为依托,旨在开发面向不同车型(A0 级、A 级、B 级和SUV)的 高性价比轮边电驱动底盘及其轮边电驱动总成模块,驱动总成产 品可匹配应用于量产车型构成混合动力四驱平台,或分布式纯电 动驱动平台(2 驱、4 驱、6 驱等),从而广泛应用于各种分布 式驱动电动汽车,如低地板电动客车、轿车、物流车、微型车和 高性能SUV 及越野车等。

动力电池管理技术是增加纯电动汽车续航里程和延长动力电池使用寿命的关键。本成果通过动力电池智能建模和开路电压估计相结合的方法精确估算电池SOC,通过分层协同技术对动力电池组进行组内分散和组间集中的均衡管理,针对动力电池的不同工作状态实现自适应动态协同均衡策略,降低电池组和单体电池之间的不一致性,延长电池组的使用寿命,根据充电不同阶段电池特性变化,通过分段智能充电方式,提高充电效率,缩短充电时间。

自1996年成功研制“世界先进、亚洲领先”中国首台开发型汽车驾驶模拟器以来,不断研制车辆动力学模型、集成技术等核心技术,研制出开发型、研究型和桌面型等系列化汽车驾驶模拟器产品,达到量产产业化水平。可提供高逼真度的汽车虚拟驾驶环境,将驾驶员的主观评价与人车交互动态的复杂交通环境引入到新一代汽车产品开发中,替代实车场地试验实现对整车及电控系统的测试、验证和标定,大幅缩短汽车开发周期、降低开发成本。

高逼真度车辆动力学建模工程服务可以为企业提供指定车型的建模参数测试、参数处理、整车场地测试、模型调试与验证,建立指定实时车辆动力学软件(包括吉林大学车辆动力学模型、carsim、carmaker、vedyna、car-realtime)逼真度达到85%以上的实时车辆动力学,可用于整车运动动力学性能仿真、分析和优化匹配,底盘电子电控系统、智能汽车控制器的测试、验证和标定。

全可变液压气门技术不但使汽车发动机的气门最大升程和配气相位连续可变,而且在同一工作循环内实现气门单次和多 次开启的快速平稳转换,从而实施多种工作模式:1)变换有效压缩比实现可变米勒循环;2)内部 EGR 控制排气温度实现排气热管理性能;3)实现排气制动提高汽车行驶安全性;4)通过气门早关实现非节流方式控制进气量。这种对发动机进气质量(温度、压力和 EGR 率)和数量的智能管理,对汽车的节能减排和行驶安全性具有重大意义。





